라이다 기반 야지 환경 내 전방 노면 높이 프로파일 및 거칠기 추정 시스템
Copyright Ⓒ 2024 KSAE / 222-02
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
Unmanned ground systems equipped with sensors, such as cameras, radar, and LiDAR, play a crucial role in detecting environmental conditions. Specifically, recognizing drivable areas in uneven terrain is essential in establishing stable navigation plans. Information on the oncoming road's height profile and roughness obtained from LiDAR sensors will help ensure safe navigation and effective control planning. This study introduces a real-time, LiDAR-based approaching road height profile and a roughness estimation system in perceiving unstructured outdoor environments. Considering the mechanical characteristics of the system, the proposed method estimates the driving path, and generates a road height profile by using LiDAR point clouds. Finally, we will be analyzing road roughness in the frequency domain, and will be classifying roughness based on the ISO 8608:2016 standard. Real-world experiments conducted in both off-road and on-road environments demonstrate the feasibility and effectiveness of the proposed system in estimating terrain roughness in real time.
Keywords:
Road surface profile extraction, Roughness estimation, LiDAR, Unstructured outdoor environment키워드:
노면 프로파일 추출, 거칠기 추정, 라이다, 야지 환경1. 서 론
지상무인체계는 주로 카메라, 레이더, 라이다(LiDAR)와 같은 센서를 통해 환경을 감지하여 운용에 도움을 준다. 이러한 지상무인체계는 노면의 상태가 불균형한 야지 환경에서 주행하기 때문에, 주행 가능 영역을 인지하고 안정적인 주행 계획을 수립하는 것이 중요하다. 이를 위해 지상무인체계가 주행할 전방 노면의 프로파일 및 거칠기 정보를 활용할 수 있다. 노면 프로파일은 가파른 경사 노면을 주행하는 경우, 노면 높이 프로파일을 이용하여 차량의 기울임을 고려한 제어를 계획할 수 있다. 노면 거칠기를 추정하면 거친 노면을 주행 시 발생할 수 있는 진동을 예측하여 줄임으로써 불안정한 주행을 방지하고 안전한 주행 계획을 수립할 수 있으며, 또한 거친 노면 위에서의 주행은 차량에 물리적인 충격을 발생시키며 하드웨어 손상을 줄일 수 있기에 하드웨어 손상을 방지할 수 있다. 노면의 거칠기 정보를 이용하여 서스펜션 적응 제어를 수행한다면 타이어와 노면 사이의 효과적인 접지를 유지함으로써 주행 성능을 향상시킬 수 있다.1,2)
노면의 높이 프로파일이나 거칠기를 추정하기 위해 카메라나 라이다 센서를 기반으로 한 연구가 이루어지고 있다. 카메라 센서를 활용할 경우 밀도 높은 2차원 픽셀 데이터를 제공하기 때문에 노면 상태에 대한 분류(Classification)가 상대적으로 쉽다는 장점이 있다. 하지만, 카메라 센서는 조도 변화 및 궂은 날씨에 취약하며, 라이다 센서 대비 정확한 3차원 거리 값 제공이 어렵다는 것이 단점이다. 라이다 센서의 경우, 조도 변화에 강인하며 정확한 3차원 거리 정보를 제공하기 때문에 노면 거칠기에 대한 정량적 데이터를 얻기에 용이하다.
카메라를 이용하는 노면 프로파일 연구들은 노면의 높이 정보가 필요하기 때문에 스테레오 카메라를 이용한다. 스테레오 카메라를 이용하여 노면의 수치표고모델(DEM)을 형성하고 노면프로파일을 추출하는 방식을 이용하였다.3,4) 라이다를 이용한 노면 프로파일 연구들의 경우 라이다와 GNSS/INS를 이용하여 포인트 클라우드를 누적한 후 노면 프로파일6)을 추출하기도 하였고 2D 라이다를 이용하여 노면 단면 형상 측정하여 포트 홀5)이나 과속 방지턱7)을 인지하기도 하였다.
다음으로, 라이다를 활용하여 노면의 프로파일뿐 아니라 노면의 거칠기를 분석한 연구들도 있었다. Kumar 등8)은 노면 거칠기를 나타내기 위한 정량적 지표를 소개하였으며, Longitudinal 방향의 거칠기에 대해 z축 표준편차로 정의하였다. Díaz-Vilariño 등9)의 경우 라이다 센서를 활용하여 도심 내 포장도로를 돌 포장, 아스팔트 등으로 분류하는 연구를 진행하였다. 또한 Seo와 Sung10)은 노면 거칠기 특성의 대푯값을 정량화하고, 타이어 접촉력 해석 기법에 대해 고찰하였다. 하지만 앞서 언급한 연구들은 대부분 도심 환경이나 시뮬레이션 환경에서 수행되었으며, 모바일 매핑 시스템이 구축한 포인트 클라우드를 오프라인에서 처리를 수행하였다. Alhasan 등11)은 야지환경에 대한 노면 거칠기 분석을 수행하였지만, 라이다 센서와 사진 측량 기법을 활용하며, 매우 밀도 있는 포인트 클라우드를 획득하였을 때만 분석이 가능하기 때문에 실시간성을 보장하지 못한다.
본 연구에서는 실시간으로 야지 환경에서 지상무인체계의 전방 노면의 거칠기를 추정하기 위해 라이다 센서 기반 전방 노면 프로파일 및 거칠기 인식 시스템을 제안한다. 제안하는 방식은 라이다 포인트 클라우드를 이용하여 전방 노면의 프로파일과 거칠기를 추정한다. 제안하는 시스템은 3D 라이다 데이터를 누적하는 등 다른 데이터 처리없이 실시간으로 차량의 전방 주행 경로에 대한 노면 거칠기를 추정할 수 있다는 특징이 있다. 전체 시스템은 지면 추출과 노면 높이 프로파일 추출, 노면 거칠기 추정의 세 파트로 구성되며 Fig. 1에 나타난다.

The overall system architecture of road height profile and road roughness estimation system
지면 포인트 클라우드 추출 단계는 노면 거칠기 추정에 필요 없는 비 지면 점 정보를 제거하기 위해 지상무인체계의 주행 특징을 고려하여 지면 포인트 클라우드 추출을 진행한다. 노면 프로파일 추출 단계는 지상무인체계의 기구적 특징을 고려하여 예상 주행 경로를 추정하고, 지면 포인트 클라우드 정보와 함께 주행 경로에 대한 노면 높이 프로파일을 생성한다. 마지막으로 주파수 영역에서 노면 높이 프로파일을 분석하여 전방 노면에 대한 거칠기를 추정한다. 지상무인체계가 실제로 지나갈 영역에 대한 거칠기 정보를 노면 프로파일을 통해 얻어내므로, 지상무인체계의 안전한 주행을 위한 제어 계획 혹은 서스펜션 적응 제어 계획을 수립할 수 있다.
제안한 시스템을 검증하기 위해 야지 환경 및 일반 도로에서 취득한 데이터를 활용하여 실제 환경 실험을 통한 검증을 진행하고, 본 연구의 타당성을 보여준다.
2. 노면 프로파일 및 거칠기 추정 시스템 구조
전체 시스템 구조는 Fig. 1에 나타난다. 주행 경로에 대한 노면 거칠기를 분석하기 위해 라이다 포인트 클라우드와 차량 속도 및 각속도 값 만을 사용한다. 포인트 클라우드는 지면의 형상을 알기 위해 사용되며 지면 포인트 클라우드 추출과 노면 프로파일 추출에 사용되어 최종적으로 노면 거칠기를 판단하게 된다. 차량의 속도와 각속도는 차량의 주행 경로를 추정하기 위해 사용된다.
첫 번째 단계로 지면 포인트 클라우드 추출을 수행한다. 차량 주변에 지면 포인트 클라우드를 추출하기 위해 평면 추정 기반의 지면 추출 기법을 이용하였다. 지상무인체계는 일반적인 포장도로나 비포장도로, 야지 등을 주행하므로 다양한 조건의 노면에서 지면을 잘 추정하여야 한다. 라이다 포인트 클라우드 데이터를 입력으로 하여, 지상무인체계 주변 포인트 클라우드에 대해 평면 추정을 통해 지상 무인체계가 주행할 지면을 추출하게 된다.
두 번째 단계는 노면 높이 프로파일 추출이다. 노면 프로파일은 지상무인체계가 주행할 지면영역에 대해 추출되어야 한다. 따라서 지상무인체계가 주행할 경로를 차량의 속도와 각속도를 이용해 원 궤도의 경로를 가정해 추정한다. 바퀴의 폭과 두 바퀴 사이의 윤거를 고려하여 두 바퀴에 대한 미래 경로를 획득한다. 해당 예상 주행 경로에 포함된 지면 포인트 클라우드를 이용하여 노면 높이 프로파일을 추출한다.
마지막으로, 노면 거칠기 분석 단계에서는 앞서 추출한 노면 높이 프로파일을 입력으로 하여 PSD(Power Spectral Density)를 활용하여 프로파일 데이터를 공간 주파수에서 해석하고, 국제표준기관(ISO, International Organization for Standardization)에서 정의한 ISO 8608:201612)의 노면 거칠기 판단 기준에 맞추어 노면 거칠기를 분류한다.
3. 지면 포인트 클라우드 추출
3D 라이다에서 취득된 포인트 클라우드에서 지면을 나타내는 포인트 클라우드만 추출한다. 지면은 3차원에서 평면의 방정식(ax + by + cz = d)으로 나타나며 평면 모수(a, b, c, d)로 정의된다. 포인트 클라우드는 지면으로 모사된 방정식과의 거리를 바탕으로 지면과 비 지면을 나눌 수 있다. 지면 추출을 위해 사용한 기법은 Patchwork14)의 지면 추출기법을 바탕으로 전방 관심 영역에 대해 수행하였다. 지면 포인트 클라우드 추출을 위해서 주성분분석(PCA, Principal Component Analysis) 평면 추정 기법이 사용되었다. 분석 대상 영역에 대한 관심영역을 설정하고 주성분 분석을 통한 평면 모수 추정 및 비 지면 포인트 제거를 반복하여 정확한 지면의 평면 모수를 얻어낸다.
Fig. 2는 한 반복에서의 진행 단계를 나타낸다. 각 반복 단계에서는 PCA를 통해 초기 포인트 클라우드의 방향 성분에 대한 직교 벡터들을 구할 수 있으며, 이때 직교 벡터 중 그 크기가 가장 작은 벡터를 평면의 법선 벡터로 사용한다. 포인트 클라우드의 평균 점을 평면의 중심점으로 사용하여 평면의 방정식을 구한다. Fig. 2(a)에서는 초기 관심 영역의 포인트 클라우드에 대한 PCA 결과를 보여준다. Fig. 2(b)에서는 PCA의 벡터를 이용해 평면 모수를 얻어내고 해당 평면에 대해 일정 높이 이상 존재하는 점들을 비 지면 포인트로 판단하여 제거한다. 본 연구에서는 20.0 cm를 기준 거리로 하였다. 지상 무인체계는 포장도로와 비포장도로, 야지 등을 주행하기 때문에 노면에 큰 굴곡이 많은 도로를 다니게 된다. 따라서 지면에 큰 굴곡이 포함되도록 하였다. 마지막으로 Fig. 2(b)와 같이 남은 포인트 클라우드는 다음 반복에서의 관심 포인트 클라우드 또는 최종 지면 포인트 클라우드로 사용된다. 한번의 지면 추정 과정으로는 정확한 지면 평면을 추정하기 힘들고 반복적으로 비 지면 포인트 제거를 통하여 정확한 지면의 추정이 가능하다. 위의 Fig. 2의 과정을 n회 반복하며 본 연구에서는 실험적으로 3회 시행하도록 설정되었다. 최종적으로 Fig. 3과 같이 남은 포인트 클라우드가 지면 포인트 클라우드로 분류된다.

Side view of one iterative step in PCA-based ground extraction

Visualization of point cloud raw data (left) and extracted ground point cloud (right)
4. 노면 프로파일 추출
지상무인체계의 전방 노면 상태를 인지하기 위해서는 앞으로 주행할 영역에 대해 바퀴가 지나갈 경로를 정확히 추출하는 것이 중요하다. 본 장에서는 지상무인체계의 속도 및 각속도 정보를 이용하여 미래 경로를 추출하고, 차량 윤거를 통해 정확한 바퀴의 예상 경로를 얻어낸다. 또 지면 포인트 클라우드와 함께 바퀴 예상 주행 경로에 대한 노면의 높이 프로파일을 추출한다.
4.1 속도 및 각속도 기반 주행 경로 추출
지상무인체계는 차륜형으로 전 후진 및 선회가 가능하다. 차륜형의 구동 체계를 이용하기 때문에 지상무인체계의 운동은 비 홀로노믹(Nonholonomic) 조건을 따른다. 이로 인해 방향 및 회전은 가능하지만 횡 방향으로 주행은 불가능하다. 따라서 지상무인체계의 운동은 현재 위치와 방향에 대한 접원 궤적을 가지며, 회전 중심은 항상 지상무인체계의 횡방향에 위치한다.
속도와 각속도를 이용하면 현재 운동의 순간 회전중심을 알아낼 수 있다. 식 (1)은 속도(V)와 각속도(ω) 그리고 지상무인체계와 회전 중심 간의 거리인 회전 반지름(rICR)의 관계를 나타낸다. 따라서 회전 중심점(PICR)은 식 (2)에 따라 지상무인체계 횡방향의 rICR 위치에 존재한다. u(ω)는 각속도에 대한 헤비사이드 계단 함수이고 좌회전과 우회전을 고려하여 수식이 일반화 가능하다.
| (1) |
| (2) |
양쪽의 좌, 우 바퀴의 궤적 또한 회전 반지름(rright, rleft)으로 표현 가능하다. 좌, 우 회전반지름은 원 궤적 반지름(rICR)과 양쪽 바퀴의 윤거(lWT)를 고려하여 식 (3)와 식 (4)처럼 얻어진다. 식 (3), (4)를 이용하면 직선 일 때는 긴 회전 반경을, 선회 운동일 때는 짧은 회전 반경으로 운동을 표현할 수 있다.
| (3) |
| (4) |

Relationship between angular velocity and linear velocity in the skid tire model
4.2 노면 경로 프로파일 추출
다음으로, 노면 높이 프로파일을 추정하기 위해 지면 포인트 클라우드와 좌우 바퀴 주행 경로를 이용한다. 지면 포인트 클라우드에 대하여 지상무인체계의 회전 중심(PICR)에서 좌, 우 바퀴 회전 반경(rright, rleft)과 바퀴 폭(lWT) 만큼의 범위에 존재하는 포인트를 경로 포인트로 하여 프로파일을 투영한다. Fig. 5는 예측된 두 바퀴의 경로의 회전반경 rright와 rleft에 바퀴 폭(lTW) 영역을 표시하였다. 바퀴 진행 영역의 점 pi에 대해 거리(Si,dist)는 식 (5)처럼 각도 ∠piPICRO과 회전 반경 (rright, rleft)의 곱으로 얻어진다. ∠piPICRO는 세 점pi, PICR, O 사이의 각도이고 거리 Si,dist는 원점으로부터 바퀴 진행 거리 방향 거리이다. 프로파일의 높이는 포인트의 z축 값이다. 노면 높이 프로파일(Sprofile)은 Fig. 6과 같이 진행 방향 거리(Sdist)에 대한 높이로 프로파일 포인트(SZ)로 구성된다. 마지막으로 노면 높이 프로파일(Sprofile)는 일정한 길이에 따라 샘플링 된다.
| (5) |
| (6) |

Trajectories and turning radio of the right and left wheels

Sampling regions by utilizing route segments
5. 노면 프로파일 거칠기 추정
5.1 ISO Road Roughness Classification 기반 전방 노면 거칠기 분류
국제 표준 기구 ISO(International Organization for Standardization)에서는 도로 표면의 프로파일을 측정하고 이를 분류하기 위한 지침인 ISO 8608:201612)을 제공한다. 여기서 프로파일은 노면 수직 방향의 프로파일을 의미하며, 측정 타겟으로 도로나 거리, 고속도로, 야지 지형 등을 포함하며, 기차가 다니는 선로는 포함하지 않는다.
ISO 8608:201612)에서 노면 프로파일을 수직방향의 변위에 대한 PSD(Power Spectral Density)로 나타내는데, 이는 단위 주파수 대역폭 당 신호의 제곱 평균에 대한 제한 값을 의미한다. PSD는 공간 주파수에 따라 로그 스케일로 표시되기 때문에 주파수가 지수적으로 증가하는 경우에도 데이터를 쉽게 이해할 수 있다. 따라서 PSD로 노면 프로파일을 나타낼 경우 수직 변위가 주파수 영역에서 어떻게 분포하는지를 나타낼 수 있다.
ISO 8608:201612)에서는 노면 거칠기 등급을 Table 1처럼 수직 변위에 대한 PSD Gd(n)에 따라 A부터 H까지 부드러운 노면부터 거친 노면을 구분한다. n은 공간 주파수(Spatial frequency) (n cycles/m)이다. 공간 주파수는 그 값에 따라 진동으로 느끼거나 소음으로 영향을 끼칠 수 있기에 공간 주파수의 판단 영역이 정의되어야 한다. ISO 8608:201612)에서 노면 프로파일의 거칠기를 공간 주파수 [0.01 4] cycles/m 영역에서 판단한다.
| (7) |

ISO 8608:201612) road classification
Table 1은 ISO 8608:201612) 정규 공간 주파수 n0(0.1 cycles/m)에서 노면 거칠기의 기준을 PSD값을 이용해 나타낸다. 식 (7)은 임의의 공간 주파수 n에 대해 정규 공간 주파수 n0와 동일한 거칠기 등급을 나타내는 PSD 값의 변환을 보여준다. 노면 거칠기의 PSD 기준을 Table 1과 식 (7)에 따라 임의의 공간주파수 n에 대해 정의해 PSD 값을 이용하여 노면 거칠기를 판단할 수 있다.
노면 높이 프로파일을 이용하여 PSD 분석을 수행하면 특정 주파수(n)에 대한 PSD(m3)값을 알 수 있기 때문에 [0.01 4] cycles/m 영역에서 각 주파수마다 노면 거칠기 등급을 구분할 수 있다. ISO 8608:201612)에서도 0.0078 cycles/m 부터 4 cycles/m까지 총 10개의 주파수 대역에서 PSD 값에 대한 노면 등급 분석이 가능한 지표도 제공한다.
5.2 프로파일 PSD 분석
노면 거칠기 분류를 위해 포인트 클라우드 데이터로부터 취득한 노면 프로파일로부터 PSD 변환을 수행한다. 이를 통해 노면 높이 프로파일을 주파수 도메인으로 변환한다.
| (8) |
| (9) |
| (10) |
식 (8)과 (9)는 노면 높이 프로파일(Sprofile)를 이용하여 주파수 영역의 PSD 값으로 변환을 나타낸다. N은 노면 높이 프로파일의 데이터 수이며 k는 푸리에 변환된 주파수 영역의 주파수 위치이다. fS는 노면 높이 프로파일을 샘플링한 공간 샘플링 주파수이다.
라이다의 경우 해상도에 따라서 노면을 관측할 해상도가 결정된다. 회전식 라이다 센서를 사용하여 센서 근처의 노면은 세밀하게 관측 가능하나 거리가 멀어질수록 노면을 인지하는 간격이 넓어진다. 이런 센서의 한계는 노면 높이 프로파일의 해상도와 노면 거칠기 분석의 주파수 범위를 제한한다.
6. Experiment
본 연구에서 제안한 전방 노면 거칠기 추정 시스템의 유효성을 검증하기 위해 야지 및 일반 도로 환경에서 실험을 진행하였다.
6.1 시험 환경
노면의 거칠기 추정 유효성 검증을 위해 야지 환경의 비포장 도로(산길) 및 일반 포장도로(아스팔트 및 시멘트 도로)의 데이터 취득이 필요하다. 이를 위해 비포장 및 포장도로가 모두 존재하는 강원도 평창의 신기봉산로 및 강원도 홍천 율전리 밤바치길 부근에서 데이터를 취득하였다.

Off-road(left) and on-road(right) where data was acquired
라이다 센서는 Ouster 사의 OS1 모델로,13) 128 채널의 레이어를 가진다. 또한 노면 프로파일을 추출하기 위해 필요한 각속도의 경우 IMU 센서로부터, 속도 정보는 시험차량의 차량 휠 속도 센서로부터 획득하였다. 취득 플랫폼은 Fig. 8과 같이 구성하였다.

A data acquisition platform for real-world experiment
6.2 도로 노면 프로파일 분석
노면 프로파일은 0.1 m 단위로 샘플링하였다. Fig. 7과 같이 비포장 및 포장도로 환경에서 취득한 라이다 포인트 클라우드는 Fig. 9와 같으며, 해당 포인트 클라우드로부터 취득한 노면 높이 프로파일은 빨간색 점으로 확인할 수 있다. 또한, Fig. 10에서 노면 높이 프로파일이 포장도로(On-road)와 비포장도로(Off-road)의 노면 굴곡이 묘사되는 것을 알 수 있다.

The result of wheel trajectory road height profile extraction

Differences in profile shape depending on the environment
6.3 노면 거칠기 분석
포장도로와 비포장 도로의 노면 높이 프로파일에 대해 PSD 분석을 수행하였다. 실험에 사용한 Ouster OS1 라이다의 경우 지면 측정 가능 거리는 [5 35] m이다. 샘플링 이론에 따라 관측가능한 주파수 영역은 [0.016 10] cycles/m 이다. 하지만 노면을 상세하고 정확히 측정가능한 정도로 설정하여 노면 거칠기 판단에 사용할 주파수 영역은 0.1 cycles/m에서 4 cycles/m로 설정하였다.
실험 결과로 포장도로의 경우 ISO 8608:201612) 기준 CLASS A와 B 사이의 값으로 도출되었다. 다만 비포장 도로의 경우 노면 상태에 따라 CLASS B 또는 C로 판단되었고 노면의 굴곡이 심한 경우에는 CLASS D로 구분되는 경우도 관측되었다. Fig. 11에서는 포장도로와 비포장 도로의 측정된 공강주파수에 따른 노면 거칠기 PSD 값을 볼 수 있다.

ISO 8608:2016 classification-based PSD analysis results for on-road(black) and off-road(red)
6.4 연산 시간 분석
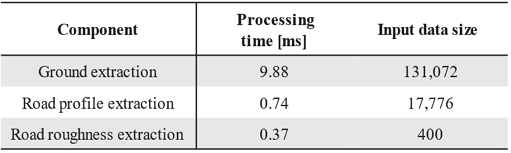
제안하는 노면 프로파일 및 거칠기 추정 알고리즘의 실시간성을 평가하기 위해 각 알고리즘의 연산시간을 측정하였다. 연산은 CPU(Intel I7-13700K)에서 수행되었으며 연산 소요시간 결과는 Table 2에 나타난다. 지면 추출과 프로파일 추출, 노면 거칠기 추정이 각각 9.88 밀리초, 0.74 밀리초, 0.34 밀리초가 소요되어 총 10.96 밀리초가 전체 연산에 소요되었다. 이로서 제안하는 알고리즘이 실시간으로 동작 가능함을 보였다.
Processing time of road profile and roughness estimation
7. 결 론
본 연구는 라이다 기반 야지 환경 내 전방 노면 높이 프로파일 및 거칠기 추정 시스템을 제안하였다. 결론은 네 가지로 요약할 수 있다.
- 1) 전방 노면에 대한 노면 높이 프로파일 추출 및 노면 거칠기 분석 시스템을 제안하였음.
- 2) 차량 속도 및 각속도를 바탕으로 주행 예상 경로를 추정하였음.
- 3) 지면 포인트 클라우드를 바탕으로 지상무인체계가 주행할 영역에 대해 프로파일을 추출하였음.
- 4) 실제 환경에서 포장도로와 비포장 도로에 대해 노면 프로파일 및 거칠기 분석 시스템 검증을 수행하였음.
본 연구에서는 라이다를 이용하여 무인지상체계 전방 노면에 대한 노면 높이 프로파일과 노면 거칠기를 추정하였다. 추후 연구로 지상무인체계나 차량 등에서 능동 제어 서스펜션과 같은 연구에 노면 거칠기 추정을 활용될 수 있을 것이다.
Acknowledgments
이 연구는 2022년도 정부(방위사업청)의 재원으로 국방기술진흥연구소의 지원을 받아 수행된 연구임(No. KRIT-CT-22-011-00, 라이다-영상 신호 융합 기술).
References
- W. S. Lee, J. W. Park, E. W. Na, B. J. Kim, and K. S. Huh, “Development of Road Roughness Classification Logic Using Deep Learning,” KSAE Annual Conference Proceedings, pp.489-491, 2017.
- Y. R. Oh, “Understanding Friction Characteristics of Rubber_Road Surface Considering Road Roughness Characteristic,” KSAE Annual Conference Proceedings, p.503, 2018.
-
J. K. Lee, and K. J. Yoon, “Temporally Consistent Road Surface Profile Estimation Using Stereo Vision,” IEEE Transactions on Intelligent Transportation Systems, Vol.19, No.5, pp.1618-1628, 2018.
[https://doi.org/10.1109/TITS.2018.2794342]

-
F. Oniga, and S. Nedevschi, “Processing Dense Stereo Data Using Elevation Maps: Road Surface, Traffic Isle, and Obstacle Detection,” IEEE Transactions on Vehicular Technology, Vol.59, No.3, pp.1172-1182, 2009.
[https://doi.org/10.1109/TVT.2009.2039718]
-
B. H. Kang, and S. I. Choi, “Pothole Detection System Using 2D Lidar and Camera,” 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), pp.744-746. IEEE, 2017.
[https://doi.org/10.1109/ICUFN.2017.7993890]
-
D. Zhao, L. Wang, Y. Li, and M. Du “Extraction of Preview Elevation of Road Based on 3D Sensor,” Measurement, Vol.127, pp.104-114, 2018.
[https://doi.org/10.1016/j.measurement.2018.05.062]
-
J. H. Lee, H. J. Kim, B. J. Cho, J. H. Choi and Y. J. Kim, “Road Bump Detection Using Lidar Sensor for Semi-Active Control of Front Axle Suspension in an Agricultural Tractor,” IFAC-PapersOnLine, Vol.51, No.19, pp.124-129, 2018.
[https://doi.org/10.1016/j.ifacol.2018.08.074]
-
P. Kumar, P. Lewis, C. P. McElhinney, and A. A. Rahman, “An Algorithm for Automated Estimation of Road Roughness From Mobile Laser Scanning Data,” The Photogrammetric Record, Vol.30, No.149, pp.30-45, 2015.
[https://doi.org/10.1111/phor.12090]
-
L. Díaz-Vilariño, H. González-Jorge, M. Bueno, P. Arias, and I. Puente, “Automatic Classification of Urban Pavements Using Mobile Lidar Data and Roughness Descriptors,” Construction and Building Materials, No.102, pp.208-215, 2016.
[https://doi.org/10.1016/j.conbuildmat.2015.10.199]
- B. G. Seo, and I. H. Sung, “Representative Evaluation of Topographical Characteristics of Road Surface for Tire Contact Force Analysis,” Tribology and Lubricants, Vol.33, No.6, pp.303-308, 2017.
- A. Alhasan, K. Younkin, and D. J. White, “Comparison of Roadway Roughness Derived from LIDAR and SFM 3D Point Clouds,” Iowa State University. Institute for Transportation, No. InTrans Project, pp.15-543, 2015.
- ISO, ISO 8608:2016 Mechanical Vibration Road Surface Profiles Reporting of Measured Data, https://www.iso.org/standard/71202.html, , 2023
- Ouster, Ouster LiDAR OS1 Medium-range Digital Lidar Sensor, https://ouster.com/products/hardware/os1-lidar-sensor, , 2023.
-
H. Lim, M. Oh, and H. Myung, “Patchwork: Concentric Zone-Based Region-Wise Ground Segmentation with Ground Likelihood Estimation Using a 3D Lidar Sensor,” IEEE Robotics and Automation Letters, Vol.6, No.4, pp.6458-6465, 2021.
[https://doi.org/10.1109/LRA.2021.3093009]