PC-CRASH의 충돌 최적화를 이용한 차량의 충돌 속도 추정

Copyright Ⓒ 2019 KSAE / 168-01
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
According to the Automobile Management Act, the EDR data of vehicles launched after 2016 should be made accessible to the public. Based on the Ministry of Land statistics, there were 54.03 million cars registered after 2016, thereby accounting for approximately 42 % of the number of cars registered between 2011 and 2018. The speed before impact is the most important factor in the case of a vehicle-to-vehicle collision. If it is possible to retrieve the EDR data, its impact speed can be extracted easily. Otherwise, we need to calculate the impact speed by using some evidence. This paper reconstructed the vehicle accident by utilizing the PC-CRASH collision optimal function with the damaged spot of the vehicle and the final stop position of the cars. We calculated the impact speed and compared this estimated impact speed with the real impact speed by using the reconstructed accident scenario. The reliability of the simulation was evaluated based on this.
Keywords:
Accident reconstruction, Collision speed, Event data recorder, Collision optimizer, Traffic accident analysis키워드:
사고재구성, 충돌 속도, 사고기록장치, 충돌 최적화, 교통사고분석1. 서 론
자동차관리법 시행규칙(2015. 12. 시행)에 의해 2016년도 이후 출시된 차량에 대해서 사고기록장치(Event Data Recorder, 이하 EDR)의 기록정보 공개가 의무화되었다. EDR은 ACU(Air-bag Control Unit)에 탑재된 기능으로 사고 발생 시 가속도 한계 및 Delta-V 등 사고기록 조건을 충족하게 되면 사고발생 5초 전부터 사고 발생 시(Time zero: T0)까지 차량 속도[km/h], 엔진회전수[RPM], 엔진 스로틀밸브 열림량[%], 제동페달 작동여부[ON/OFF], 바퀴잠김방지식제동장치(ABS) 작동여부[ON/OFF], 자동차 안정성 제어장치(ESC) 작동여부[ON/OFF/engaged], 조향핸들 각도[°] 등의 정보를 0.5초 단위로 기록한다.1,2)
북미의 경우에는 1990년대 후반부터 EDR 기록정보에 대한 신뢰성 연구가 수행되었지만,3,4) 국내의 경우에는 2016년도 이후부터 EDR 기록정보 공개의무화가 이뤄짐에 따라 박종찬 등5)은 충돌 실험을 통해 EDR 기록정보에 대한 신뢰성 평가를 수행하였고, 한인환6)은 전체 충돌 사고의 일부 EDR 기록정보를 활용해 사고재구성 방법에 대해 연구를 하였다. 임상현 등7)은 EDR 기록정보를 활용해 다중 및 연쇄 추돌 사고에 대한 분석방안을 제시하였고, 윤대권 등8)은 사고사례를 바탕으로 EDR 기록정보와 택시에 장착된 자동차운행기록계(DTG)의 데이터 비교 평가에 관한 연구를 하였다.
이처럼 EDR 기록정보를 활용하여 사고재구성 방법을 제시하거나 기록정보에 대한 신뢰성 검토에 관한 연구는 다양하게 제시된다. 하지만 국토교통부 통계자료의 자동차등록현황을 참고하면 2011년도부터 2018년도까지 등록된 승용 차량의 대수는 총 13,010만대이며, EDR 기록정보 공개 의무화에 해당하는 차량은 2016년도 이후 등록된 차량인 5,403만대이다. 이는 전체 등록대수의 약 42 %를 차지하며, 나머지 58 %에 해당하는 7,607만대에 대한 차량은 EDR 기록정보 공개 의무화에 해당하지 않기 때문에 기록정보에 대한 추출이 불가할 수 있다.9)
사고 차량이 EDR 기록정보 추출이 가능한 차량이라면 선행 연구를 바탕으로 사고 상황 및 충돌 속도를 알 수 있지만, EDR 기록정보 추출이 불가능한 차량의 경우에는 명확한 충돌 속도를 알 수 없어 차량의 파손사진과 최종 정지위치 등을 바탕으로 사고 재구성을 해야 한다. 이러한 차 대 차 충돌 사고에서는 차량의 충격 자세, 제동여부, 최종 정지위치, 충격 지점 및 충돌 속도는 사고 재구성을 위한 주요 요소이며, 충격 속도는 가장 중요한 쟁점으로 다뤄진다.
PC-CRASH는 교통사고분야에서 사고재구성에 사용되는 프로그램이며, 뉴턴역학을 기반으로 충돌 전 속도 및 충돌 자세등과 같은 다양한 변수들을 고려하여 차량의 충돌 후 거동을 모사할 수 있고 사고에 대한 해석 및 3차원 사고재구성이 가능하다. Moser등10)은 사고 전 충돌 변수를 바탕으로 충돌 후 거동을 모사는 PC-CRASH의 충돌 최적화 기능 개발에 관한 연구를 수행하였으며, Ziola 등11)은 PC-CRASH에 차량 파손상태를 고려한 사고 상황을 설정하고 사고 영상과 비교 분석을 통해 사고 재구성 및 신뢰성에 대한 연구를 진행하였다.
이처럼 충돌 사고에서 PC-CRASH를 이용하여 사고를 재구성하고, 사고영상에서 확인되는 차량의 동적 거동을 모사하는 연구가 진행되었지만 재구성된 결과에 대한 검증 및 EDR 기록정보와 비교 분석한 연구는 미비한 상황이다.
본 연구에서는 차 대 차 충돌 사고에 대하여 PC-CRASH의 충돌 최적화 기능을 이용해 사고 재구성하고 시뮬레이션을 통해 계산된 충돌 속도를 EDR 기록정보와 비교 분석 하였다. 차량의 주요 제원을 입력하고 정적안전성인자(SSF, Static Stability Factor)를 역계산하여 차량 무게중심을 설정하였다.12) 충돌 지점 및 최종 정지위치를 PC-CRASH에 설정하고 프로그램의 충돌 최적화 기능을 이용하여 사고재구성을 수행하였다. 충돌 최적화 기능을 통해 추정된 충돌 속도를 EDR 기록정보의 충돌 속도와 비교하고, 충격 자세 및 주충격력(Principle Direction of Force)이 작용한 방향에 대한 비교분석을 통해 PC-CRASH 시뮬레이션 결과에 대한 신뢰성을 평가하였으며, 차량의 최종정지위치 및 차량 파손상태만을 이용한 사고재구성 방법을 제안하였다.
2. 충돌 사고 사례
방범용 CCTV 혹은 블랙박스 영상과 같이 사고 영상이 있는 경우에는 재구성한 시뮬레이션 결과를 사고 영상과 비교하여 해석된 결과에 대한 신뢰성 검토를 할 수 있다. 하지만 사고 영상이 없거나 충격에 의해 블랙박스가 이탈되는 경우에는 충돌 후 상황을 알 수 없게 된다. 그러므로 본 연구에서는 충격 전・후 상황이 기록된 사례 1과 충돌 후 거동에 대한 확인이 불가능한 사례 2를 바탕으로 사고재구성을 하였다.
2.1 사례 1
첫 번째 사례는 2018년에 현대자동차의 싼타페(Santafe) 차량과 아이오닉(IONIQ) 차량이 정면 충격한 사고이다. Fig. 1은 싼타페 차량을 뒤따라 주행하던 차량의 블랙박스 영상에 기록된 사고 상황을 정리한 그림이다.

Scene of a traffic accident
Fig. 2는 블랙박스 영상과 사고 현장에서 차량의 최종 정지위치를 나타낸다. 각각의 차량은 충격 후 진행하던 방향을 기준으로 약 90도 회전한 상태로 최종 정지한 것을 확인할 수 있다. Fig. 3은 차량의 파손부분에 대한 그림이다. 각 차량의 전면 범퍼는 충격에 의해 이탈되고, 좌측앞부분은 충격에 의해 심하게 파손된 상태이다. 그리고 차량의 후방 및 우측 펜더, 우측 도어 등과 같은 부분에서는 심각한 파손 및 변형은 보이지 않는다.

Accident scene

Damaged of the vehicle (CASE 1)
2.2 사례 2
두 번째 사례는 2019년에 중앙선을 침범하여 상대 차로로 주행 중인 현대자동차의 아반떼(Avante) 차량과 한국GM의 크루즈(Cruze) 차량이 정면 충격한 사고이다. 크루즈 차량에는 블랙박스가 장착되어 있었지만 충격에 의해 블랙박스가 이탈하면서 충돌 전 까지만 영상기록이 되었다. 도로상의 방범용 CCTV나 후속 차량이 존재하지 않아 각 차량의 충돌 후 거동은 알 수 없으며, 크루즈 차량의 블랙박스 영상을 바탕으로 충돌 전 상황은 Fig. 4와 같다.

Scene of a traffic accident
Fig. 5는 각 차량의 최종 정지위치를 나타낸다. 크루즈 차량은 아반떼 차량과 1차 충격 한 후 진행방향 좌측에 있는 가드레일에 2차 충격을 하여 정지하였고, 아반떼 차량은 크루즈 차량과 1차 충격한 후 약 180도 회전한 상태로 최종 정지하였다.

Accident scene
Fig. 6은 차량의 파손부분에 대한 그림이다. 각 차량은 충격에 의해 차량 전면부가 심하게 파손된 상태이다. 각 차량의 프론트 패널을 중심으로 충격 정도를 비교하였을 때, 아반떼 차량의 경우에는 좌측 부분이 더 많이 변형되었고, 크루즈 차량의 경우에는 우측부분이 더 많이 변형된 것을 확인할 수 있다.

Damaged of the vehicle (CASE 2)
3. PC-CRASH 시뮬레이션
3.1 Trajectory model
PC-CRASH는 충돌 전 속도, 충돌 자세 등의 다양한 변수들을 고려하여 차량의 충돌 후 거동을 모사하는 프로그램이다. 이러한 차량의 충돌 후 거동을 결정하는데 있어 PC-CRASH에서 사용되는 모델은 운동학 모델(Kinematics model)과 동역학 모델(Kinetics model)이다. PC-CRASH에서 기본적으로 사용되는 모델은 동역학 모델이다. 이 모델은 초기에 설정된 속도에서 충돌이 발생할 경우 타이어에 작용하는 종방향 및 횡방향 힘을 기반으로 5 ms (Default value) 단위로 차량의 무게중심에 가해지는 가속도를 계산하여 차량의 다음 궤적을 계산한다.13)
3.2 차량 제원 입력
사고재구성 시뮬레이션에서 가장 기본적이며 중요한 요소는 차량의 제원이다. 차량의 제원은 각 차량의 제조사 홈페이지에서 조회가 가능하지만, 차량의 무게중심높이에 대한 값은 나와 있지 않다. PC-CRASH에 차량의 무게중심높이는 기본적으로 “0”으로 설정되며, 이러한 경우 충돌 후 차체가 들리거나 전복되는 상황을 모사하는데 어려움이 존재한다. 그러므로 본 연구에서는 차량안전도평가(KNCAP)결과에서 정적안전성인자(Static Stability Factor, SSF)계수를 참고하여 차량의 무게중심높이를 역계산하였다.12)
정적안전성인자(SSF)는 75 kg의 인체모형 1명을 운전석에 탑승시킨 상태에서 윤거(전・후륜 평균)와 무게중심 높이를 측정하여 아래 식 (1)과 같이 계산된다. 각 사례에 대한 차량의 주요 제원 및 무게중심높이는 Table 1과 같다.
| (1) |
where, T : tread (m)
H : height of the centre of gravity (m)

Vehicle specifications
3.3 충돌 최적화
충돌 최적화(Collision optimizer)기능은 최초 충돌 위치, 충격 자세 그리고 최종 정지 위치를 설정한 후, 최적화 알고리즘을 통해 차량의 궤적오차(Trajectory error)를 최소화 하여 충돌 속도를 계산해주는 기능이다.13)
사고재구성 시뮬레이션을 위해 PC-CRASH 상에서 설정한 차량의 충격위치, 자세 그리고 최종 정지위치는 Fig. 7, Fig. 8과 같다.

Vehicle position of CASE 1

Vehicle position of CASE 2
최적화에 사용되는 입력변수와 각 변수들의 변화값은 아래 Table 2와 같으며, 상위 2개 항목(Impact velocity, Point of impact)은 최적화 과정에서 기본적으로 선택된다. 본 연구에서는 사고차량의 범퍼높이에 따라 충격지점의 Z축 위치가 달라지는 것을 고려하기 위해 “POI z coordinate”를 추가로 선택하였고, 차량의 파손형태와 최종 정지위치를 고려하여 충격 자세 및 주충격력방향을 설정하였으므로 “Pre-impact directions”와 “Vehicle position” 조건을 추가하여 총 5가지 입력변수를 적용하여 충돌 최적화를 수행하였다.
Optimization parameters
충돌 최적화에 사용되는 알고리즘은 선형알고리즘, 유전알고리즘, 몬테카를로 방식이 존재한다. 선형알고리즘은 차량의 충돌 속도(Impact velocity)와 충격 작용점의 위치(Point of impact)만을 이용해 차량의 속도를 변화시켜가며 궤적오차를 감소시키는 기법이다. 유전알고리즘은 각 차량의 설정 속도에서 입력변수들을 변화시켜 궤적오차가 가장 작은 경우를 1차적으로 선발하고, 1차 선발된 사고 상황에 대해 다시 재계산하며 2차 선발을 수행하는 방식을 반복하여 선발된 사고 상황들 간의 궤적오차가 비슷할 때까지 반복 계산하는 기법이다. 몬테카를로는 총 100번의 충돌 해석을 수행하여 차량의 충돌 속도를 범위 값으로 계산하는 기법이다.13) 본 연구에서는 다양한 변수를 적용할 수 있고, 최적의 궤적오차를 계산하는 유전알고리즘을 사용하였다.
4. 충돌속도 분석
사례 1과 사례 2에 대한 PC-CRASH 사고재구성 시뮬레이션 결과는 아래 Fig. 9와 Fig. 10과 같다. 두 사례 모두 설정한 최종 정지위치에 근접하게 시뮬레이션 되는 것을 확인할 수 있다.

Simulation result of CASE 1

Simulation result of CASE 2
사례 1의 경우에는 총 77번의 최적화 시뮬레이션을 통해 얻은 결과이며 궤적오차는 5.3 %로 계산되었다. 사례 2의 경우에는 총 192번의 시뮬레이션이 수행되었고, 궤적오차는 4.1 %로 계산되었다.
Table 3과 Table 4는 충돌 최적화를 통해 계산된 각 차량의 충돌 속도를 EDR 기록정보와 비교한 표이다.
Vehicle speed of CASE 1
Vehicle speed of CASE 2
사례 1의 경우 싼타페 차량의 속도는 57.00 km/h이고 아이오닉 차량의 속도는 46.00 km/h로 계산된다. EDR 기록정보의 경우 사고 당시 각 차량의 속도는 57 km/h, 44 km/h이다. PC-CRASH를 통해 계산된 각 차량의 속도는 EDR 기록정보와 0 km/h, 2 km/h의 편차가 발생하였다.
사례 2의 경우 아반떼 차량은 100.12 km/h로 계산되고, 크루즈 차량은 72.10 km/h 속도로 계산된다. EDR 기록정보의 경우 101 km/h, 69 km/h로 데이터 분석이 되며 시뮬레이션과는 0.88 km/h, 3.1 km/h의 편차가 발생하였다.
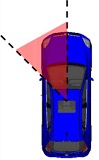
충돌 최적화 결과에서 충격 방향에 대한 비교를 위해 EDR 기록정보의 Delta-V를 바탕으로 PDOF(Principle Direction of Force)를 계산하여 비교하였다. PDOF란 두 차량이 최대 결합된 상태에서 충돌력의 주된 방향을 의미하며 Fig. 11과 같이 정의된다. 식 (2)는 PDOF의 계산식을 나타낸다.14)
| (2) |
where, ∆Vx: change in velocity in the longitudinal direction (km/h)
∆Vy: change in velocity in the lateral direction (km/h)

PDOF definition
Table 5와 Table 6은 각 사례에 대한 종방향 및 횡방향의 Delta-V 그리고 PDOF의 각도를 표시하였다. 사례 1의 경우 EDR 기록정보의 Delta-V와 PC-CRASH 프로그램의 Delta-V 값은 종방향의 경우 싼타페 차량은 0.6 km/h, 아이오닉 차량은 3.9 km/h 의 차이가 발생하고 횡방향의 경우 6.5 km/h, 3.5 km/h의 차이가 발생한다. 식 (2)를 통해 계산된 PDOF 의 방향에서도 싼타페 차량은 약 7도, 아이오닉 차량은 약 3도의 차이가 발생한다. 사례 2의 경우 종방향 Delta-V 값은 아반떼 차량의 경우 약 6.9 km/h, 크루즈 차량의 경우 11.9 km/h의 차이가 발생하고 횡방향의 경우 13.1 km/h, 7.0 km/h의 차이가 발생한다. PDOF의 경우 아반떼 차량은 약 7도, 크루즈 차량은 약 9도의 차이가 발생한다.
Delta-V and PDOF of CASE 1
Delta-V and PDOF of CASE 2
PDOF는 사고재구성시 주충격방향을 나타내며, 차량의 파손상태와 비교하여 충돌 자세를 설정하는데 이용한다. Table 7에는 자동차를 8분면으로 구분하였을 때, 계산된 PDOF의 각도가 존재하는 분면을 나타낸다. EDR 기록정보를 바탕으로 계산한 PDOF와 PC-CRASH 사고재구성 시뮬레이션에서 계산된 PDOF의 값은 모두 같은 분면에 존재하는 것을 확인할 수 있으며, 실제 차량의 주된 파손부위와도 동일한 것을 확인할 수 있다.
PDOF Direction
5. 결 론
본 연구에서는 차 대 차 충돌 사고에 대하여 PC-CRASH의 충돌 최적화 기능을 이용해 사고 재구성하고 계산된 충돌 속도와 충격 방향을 EDR 기록정보와 비교 분석하였고 다음과 같은 결론을 도출하였다.
- 1) 사고 차량에 대한 정확한 제원과 최종 정지위치를 알고 있을 경우, PC-CRASH를 이용해 사고재구성을 해도 계산된 속도는 실제 EDR에 기록되는 충돌 속도와 매우 근접한 속도 값을 갖는다. 그러므로 EDR 기록정보 추출이 불가한 차량의 경우에도 차량의 최종 정지위치와 차량 파손부분을 충분히 고려한다면 PC-CRASH를 이용한 차 대 차 사고재구성은 가능할 것으로 사료된다.
- 2) PC-CRASH에서 계산된 Delta-V의 경우 EDR 기록정보와 비교하였을 때, 종방향 및 횡방향의 편차는 발생한다. 하지만 계산된 PDOF의 각도에서는 큰 편차를 보이지 않으며, 이는 사고 차량의 주된 파손부위와 일치할 뿐만 아니라 충격 방향은 모두 같은 분면에 표시되는 것을 확인할 수 있다.
이러한 결론들을 바탕으로 본 연구에서는 PC-CRASH를 통해 EDR 기록정보 추출이 불가능한 차 대 차 사고에 대한 사고재구성 방법을 제시하고, EDR 기록정보가 존재하는 사고 사례와 비교 분석을 통해 PC-CRASH를 이용한 사고재구성 시뮬레이션의 신뢰성을 보다 높일 수 있을 것으로 판단된다. 또한 향후에는 측면 및 추돌 사고 상황에 대한 사고사례를 바탕으로 PC-CRASH를 통해 사고재구성을 수행할 계획이다.
Acknowledgments
이 논문은 행정안전부 주관 국립과학수사연구원 중장기과학수사감정기법연구개발(R&D)사업의 지원을 받아 수행한 연구임(NFS2019TAA01).
References
- 49CFR563, Event Data Recorder [Docket No. NHTSA-2006-25666] RIN 2127-AI72, 2006.
- KS R 5076:2014, Accident Data Recording Systems for Road Vehicles, 2014.
-
W. Vandiver, R. Anderson, I. Ikram, B. Randles and C. Furbish, “Analysis of Crash Data from a 2012 Kia Soul Event Data Recorder,” SAE 2015-01-1445, 2015.
[https://doi.org/10.4271/2015-01-1445]

-
J. Lawrence, C. Wilkinson, B. Heinrichs and G. Siegmund, “The Accuracy of Precrash Speed Captured by Event Data Recorders,” SAE 2003-01-0889, 2003.
[https://doi.org/10.4271/2003-01-0889]
-
J. C. Park, J. H. Kim, W. T. Oh, J. H. Choi and J. J. Park, “Reliability Evaluation of EDR Data Using PC-Crash & VBOX,” Transactions of KSAE, Vol.25, No.3, pp.317-325, 2017.
[https://doi.org/10.7467/KSAE.2017.25.3.317]
-
I. Han, “Optimization Analysis in Reconstruction of Vehicle Collision Accidents with Deficient EDR Data,” Forensic Science International, No.283, pp.103-110, 2018.
[https://doi.org/10.1016/j.forsciint.2017.12.010]
-
S. H. Lim, J. C. Park, J. H. Kim, W. T. Oh, J. H. Choi and J. J. Park, “Analysis of Multi-Car Rear-End and Chain Reaction Collision Using EDR,” Transactions of KSAE, Vol.27, No.2, pp.101-108, 2019.
[https://doi.org/10.7467/KSAE.2019.27.2.101]
- D. W. Yun, H. T. Lee, I. W. Nam, Y. H. Kim and J. G. Yun, “Comparison Evaluation of Car Tachograph Information and EDR Data,” KSAE Fall Conference Proceedings, pp.1366-1370, 2017.
- Ministry of Land, Infrastructure, and Transport(Total Registered Moter Vehicles), http://stat.molit.go.kr, , 2019.
-
A. Moser and H. Steffan, “Automatic Optimization of Pre-Impact Parameters Using Post Impact Trajectories and Rest Positions,” SAE 980373, 1998.
[https://doi.org/10.4271/980373]
-
A. Ziola, “Verification of Road Accident Simulation Created With the Use of PC-Crash Software,” Scientific Journal of Silesian University of Technology, Series Transport, Vol.98, pp.211-221, 2018.
[https://doi.org/10.20858/sjsutst.2018.98.20]
- KNCAP, KNACAP, http://www.kncap.org, , 2019.
- PC-CRASH, PC-CRASH Manual, http://www.pc-crash.com, , 2019.
-
K. D. Kusano and H. C. Gabler “Automated Crash Notification: Evaluation of In-vehicle Principal Direction of Force Estimations,” Transportation Research Part C, No.32, pp.116-128, 2013.
[https://doi.org/10.1016/j.trc.2012.09.005]