다양한 가변 압축비 엔진 기구의 기구학적 구조 분석

* This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
Due to environmental issues and regulations, there have been numerous efforts to develop high efficient environmentally friendly vehicle engines among the automotive industry and academia. One of such developments is variable compression ratio(VCR) engine technology that improves fuel efficiency by varying the compression ratio of an internal combustion engine according to the vehicle performance needs. There are many patents and research papers related to variable compression ratio engines, however, no VCR engine has succeeded in being put to commercial use yet. In this paper, VCR engines are analyzed from the viewpoint of kinematic structure. For this, various VCR engine mechanisms appeared in patents and research literature are represented in conventional and contracted graphs which enable easy comparisons of VCR engine mechanism structures by expressing the connectivity of links of the mechanisms. It is found that some VCR engine mechanisms share the same kinematic structure.
Keywords:
Variable compression ratio engine, Kinematic structure analysis, Graph theory, Conventional graph, Contracted graph키워드:
가변 압축비 엔진, 기구학적 구조 분석, 그래프 이론, 기구 그래프, 축약 그래프1. 서 론
최근 자동차 시장은 환경규제와 연비경쟁 등으로 고효율 친환경 자동차에 화두가 맞춰지고 있으며, 이에 따라 자동차 업계에서는 다양한 기술의 개발을 통해 시장 요구에 대응하고 있다. 이러한 기술 중 가변 압축비(VCR: Variable Compression Ratio) 엔진은 구동 중에 압축비를 변화시키는 시스템으로 저부하 영역에서는 압축비를 높게 하여 효율을 높이고, 고 부하 영역에서는 압축비를 낮게 하여 노킹방지 및 원활한 내부 열전달을 가능하게 함으로써 기존의 고정 압축비 엔진에 비해 작은 배기량으로도 동등한 출력을 얻을 수 있어 엔진 다운사이징(Down sizing) 기술의 하나로 기대되고 있다.
현재까지 특허와 문헌을 통해 매우 다양한 형태의 가변 압축비 엔진이 발표되었다. 본 논문에서는 기구학적 그래프 이론(Graph theory)을 이용하여 다양한 가변 압축비 엔진의 기구학적 구조를 체계적으로 분류하고 각 기구의 공통점과 차이점을 분석하였으며, 이를 통해 새로운 형태의 가변 압축비 엔진 기구를 개발하는 데 도움을 주는 것을 목적으로 한다.
2. 관련 이론
2.1 압축비
내연기관의 압축비(CR: Compression Ratio)란 실린더 내의 혼합공기가 피스톤에 의해 압축되는 용적의 비율로, Fig. 1에서 보는 것과 같이 피스톤이 하사점(BDC: Bottom Dead Center)에 있을 때의 실린더 내부 용적과 피스톤이 상사점(TDC: Top Dead Center)에 있을 때의 내부 용적의 비율로 다음과 같이 나타낼 수 있다.1)

Stroke and volumes for compression ratio calculation
| (1) |
여기서 Vc는 연소실 체적(Combustion chamber volume), Vs는 피스톤이 상사점과 하사점 사이를 움직일 때 만들어내는 행정(Stroke)에 피스톤의 단면적을 곱한 행정에 의한 체적(Cylinder stroke volume)을 나타낸다.
2.2 기구의 그래프 표현
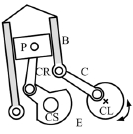
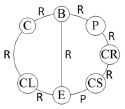
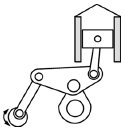
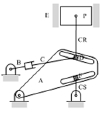
기구(Mechanism)는 링크(Link)가 조인트(Joint)에 의해 연결되어 기구학적 연쇄(Kinematic chain)를 이루며, 기구를 구성하는 링크와 조인트의 연결성에 의해 그 구조와 특징이 달라진다. 이러한 연결성은 기구가 간단한 경우에는 Fig. 2의 기구 선도(Skeleton diagram)를 이용하여도 쉽게 알 수 있지만 기구가 복잡해지면 파악하기가 어려워진다.

Representation of a mechanism
기구의 연결성과 특징은 기구를 그래프(Graph)로 표현하면 쉽게 파악할 수 있다. 그래프는 선(Edge)에 의해 연결된 점(Vertex)으로 이루어지며, Fig. 2의 기구를 일반 그래프(Conventional graph)로 표현하면 링크를 점으로, 조인트를 선으로 나타내어 기구의 링크와 조인트의 연결성을 나타낸 기구의 표현이 된다. 기구를 그래프로 표현하면 링크의 길이나 형상 등에 상관없이 기구의 연결성을 쉽게 나타낼 수 있어 기구의 기구학적 구조를 파악하거나 서로 다른 기구를 쉽게 비교할 수 있으며, 기구의 형태 합성(Type synthesis)에도 사용할 수 있다. 그래프에서 점에 연결된 선의 수에 따라 이원(Binary) 점, 삼원(Ternary) 점 등이라고 하며, 일반 그래프에서 이원점으로만 연결된 선을 단일 선으로 표현하여 삼원점 이상만을 표현한 Fig. 2의 축약 그래프(Contracted graph)를 이용하면 기구의 특징을 더욱 간단하게 표현할 수 있다.2)
2.3 기구의 자유도 방정식
기구의 자유도(Degree of freedom)란 기구를 구성하는 모든 링크의 위치와 방향을 나타내기 위해 필요한 독립적인 입력원의 수 또는 독립변수의 수를 나타낸다. 기구의 자유도는 움직이는 링크가 조인트에 의해 구속되지 않았을 때의 자유도 총합에서 각 조인트가 링크로부터 빼앗아가는 자유도의 총합을 빼면 다음과 같이 구할 수 있다.2)
| (2) |
여기서 F는 기구의 자유도, λ는 운동변수, l은 링크 수, j는 조인트 수, fi는 i번째 조인트가 허용하는 자유도를 나타낸다. 운동변수란 기구가 평면운동을 하면 3, 공간운동을 하면 6의 값을 갖는다.
복잡한 기구의 경우에는 독립적으로 사용될 수 있는 기구가 결합되어 사용되는 경우가 있으며, 기구에 존재하는 독립적인 기구는 그래프에서는 독립 루프로 표현된다. Fig. 2의 기구의 경우, 링크 1, 2, 3, 6과 링크 3, 4, 5, 6로 이루어진 두 개의 독립적인 기구가 결합된 형태이며, 그래프에 두 개의 독립 루프가 있음을 알 수 있다. 기구에 포함된 독립 루프 수(Lind)는 기구의 링크 수와 조인트 수에 의해 다음과 같이 나타낼 수 있다.
| (3) |
따라서 기구의 자유도는 독립 루프 수와 조인트 자유도의 총합으로 다음과 같이 표현할 수 있다.
| (4) |
3. 가변 압축비 엔진 기구의 그래프 분석
현재까지 문헌으로 발표된 가변 압축비 엔진 기구는 구동 방법과 작동 원리가 매우 다양하다. 이러한 다양한 가변 압축비 엔진 기구를 그래프로 표현하여 기구 구조를 분석하면 그 특징을 비교적 쉽게 이해할 수 있다.
3.1 가변 압축비 엔진 종류
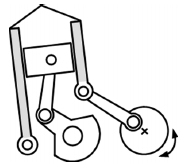
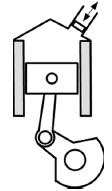
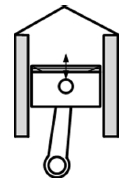
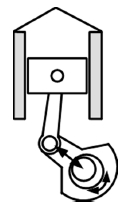
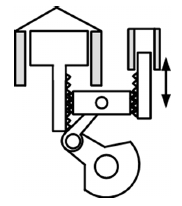
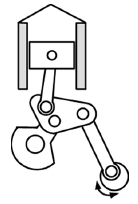
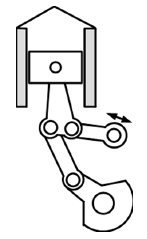
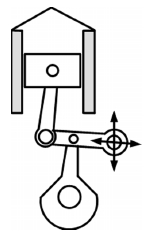
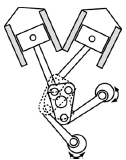
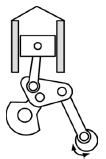
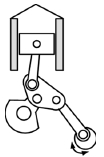
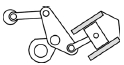
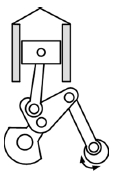
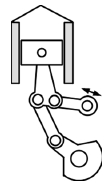
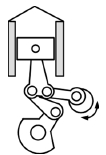
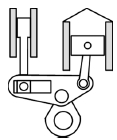
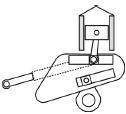
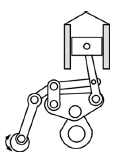
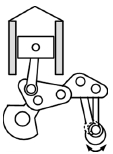
가변 압축비 엔진 기구는 크게 아홉 가지로 분류할 수 있다. Fig. 33,4)은 그 분류 방법을 나타내는 한 예로, 그림에서 Type 1은 엔진 블록을 움직이는 방식, Type 2는 실린더에 추가공간을 이용하는 방식, Type 3은 피스톤의 높이를 변경하는 방식, Type 4는 커넥팅로드 대단부의 핀을 편심시키는 방식, Type 5는 크랭크 핀을 편심 시키는 방식, Type 6은 기어를 이용한 방식이며, Type 7, 8, 9는 상사점과 하사점을 조절하기 위한 추가 링크를 설치하여 가변 하는 멀티링크(Multi-link) 방식이다.

Types of variable compression ratio engine mechanisms
Fig. 3의 Type 1~9까지의 각 방식들에 대한 대표적인 가변 압축비 엔진 기구를 정리하면 Table 1과 같다.

Examples of variable compression ratio engine types
3.2 가변 압축비 엔진 그래프 분석
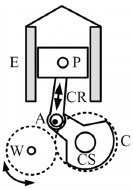
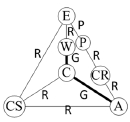
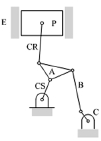
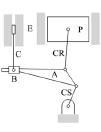
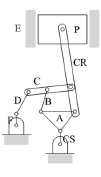
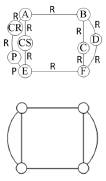
기존의 고정 압축비 엔진 기구인 슬라이더-크랭크(Slider-crank) 기구를 기구 선도와 일반 그래프로 나타내면 Fig. 4와 같고, 왼쪽의 기구 선도에서 E는 엔진블록(Engine block), P는 피스톤(Piston), CR은 커넥팅 로드(Connecting rod), CS는 크랭크 축(Crank shaft)을 나타내며, 오른쪽 그림의 일반 그래프에서 R은 회전(Revolute) 조인트, P는 병진(Prismatic) 조인트를 나타낸다.

Kinematic graph of a conventional engine
Table 1의 Type 1, 4, 5, 6에 나타낸 가변 압축비 엔진 기구를 일반그래프로 표현하면 Table 2와 같고, 여기서 Type 4와 6의 일반 그래프에 표현된 굵은 실선은 2자유도를 허용하는 기어(Gear) 조인트를 나타낸다.
Graphs of VCR engines of type 1, 4, 5 and 6
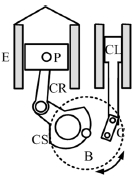
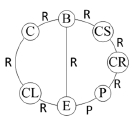
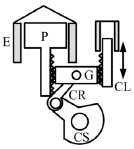
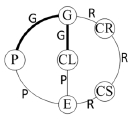
Table 1의 가변 압축비 엔진 중 회전(R) 조인트와 병진(P) 조인트와 같이 1자유도를 허용하는 조인트만으로 이루어진 Type 7, 8, 9 및 다른 멀티링크방식 가변 압축비 엔진 기구를 일반 그래프와 축약 그래프로 표현하면 Table 3과 같다.
Graphs of multi-link type VCR engine mechanisms
Table 2와 3의 가변 압축비 엔진 기구는 모두 2 자유도를 갖는 평면 운동기구이므로 식 (2)에 F=2와 λ=3, 그리고 1 자유도를 허용하는 조인트만 포함된 경우에는 기구를 구성하는 조인트의 수와 조인트가 허용하는 자유도 총합이 같으므로 를 대입하여 정리하면 기구를 구성하는 링크 수와 조인트 수 사이에 다음의 관계가 성립한다.
| (5) |
따라서 Table 2의 Type 1과 Type 5의 기구와 Table 3의 No. 1에서 No. 9까지의 기구는 7개의 링크와 8개의 조인트로 구성되어 있고 식 (3)에 의해 기구 내에 독립 루프가 각각 2개씩 존재함을 알 수 있으며, Table 3의 No. 10에서 No. 12까지의 기구는 9개의 링크와 11개의 조인트로 구성되어 있고 식 (3)에 의해 기구 내에 독립 루프가 각각 3개씩 존재함을 알 수 있으며, 각 기구의 그래프를 통해 독립 루프의 수를 확인할 수 있다.
가변 압축비 엔진 기구에 기어 조인트가 사용된 Table 2의 type 4의 기구는 7개의 링크와 기어 조인트 2개를 포함한 9개의 조인트로 이루어져 있으며 식 (3)에 의해 3개의 독립루프가 존재함을 알 수 있다. 이 기구는 2자유도 평면 운동기구이므로 식 (2)에 F=2와 λ=3을 대입하고 기구에 사용된 기어 조인트의 수를 jg, 기어 조인트를 제외한 그 외의 1자유도 조인트의 수를 jl이라고 하면 기구에 사용된 조인트의 총 개수는 j = jl + jg이고 기어 조인트의 자유도가 2이므로 식 (2)의 조인트가 허용하는 자유도 총합은 가 되므로 이를 식 (2)에 대입하여 정리하면 다음의 관계가 성립한다.
| (6) |
링크 6개와 기어 조인트 2개를 포함한 조인트 7개로 이루어진 Table 2의 Type 6기구는 자유도 방정식 (2)의 예외적인 경우로 식 (2)에 λ=3, l=6, j=7, 를 대입하면 자유도가 3이나 실제로는 2자유도 기구로 가변 압축비 엔진 기구로 사용이 가능하다.
기구 구조의 관점에서 보면 Table 3의 No. 1부터 No. 6까지의 기구는 동일한 기구 선도, 일반 그래프, 축약 그래프를 갖고 있으나 모두 모두 각각의 특허를 갖고 있음을 알 수 있으며, Table 3의 No. 7과 No. 8의 기구도 같은 경우임을 알 수 있다. 이를 통해 서로 다른 특허를 가진 기구라도 같은 그래프를 갖고 있을 수 있다는 것을 알 수 있다.
4. 결 론
본 논문에서는 기구 선도만으로는 판단하기 어려운 다양한 가변 압축비 엔진 기구의 기구학적 구조를 파악하기 위해 기구학적 그래프 이론을 이용하여 기구를 그래프로 표현하고 분석하였다. 이를 위해 기구의 자유도를 구하는 방정식과 기구의 그래프 이론 관련 식으로부터 기존 가변 압축비 엔진기구의 링크 수와 조인트 수, 그리고 기구의 독립루프 수의 관계에 대하여 설명하였으며, 기구의 그래프에 배열된 링크와 조인트의 연결성 검토하여 기존의 가변 압축비 엔진기구의 구조를 파악하였고, 또한 서로 다른 가변 압축비 엔진 기구가 기구학적으로 동일한 기구인지의 여부를 판단하였다.
본 논문의 결과에 따르면 기존의 가변 압축비 엔진의 기구학적 구조는 서로 다른 형태의 그래프를 갖는 경우도 있지만 일부는 같은 그래프를 공유하는 기구도 있음을 알 수 있다. 본 연구의 과정 및 결과를 이용하면 새로운 형태의 가변 압축비 엔진 기구의 합성에 도움이 될 것으로 기대한다.
Acknowledgments
이 논문은 2013년도 정부(미래창조과학부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구 사업임(No. 2007-0056094).
References
- Y. Wang, Introduction to Engine Valvetrains, SAE International, Warrendale, (2007).
-
L. W. Tsai, Mechanism Design: Enumeration of Kinematic Structures According to Function, CRC Press, Boca Raton, (2000).
[https://doi.org/10.1115/1.1334346]

-
M. Schwaderlapp, K. Habermann, and K. I. Yapici, “Variable Compression Ratio - A Design Solution for Fuel Economy Concepts”, SAE 2002-01-1103, (2002).
[https://doi.org/10.4271/2002-01-1103]
-
M. Roberts, “Benefits and Challenges of Variable Compression Ratio(VCR)”, SAE 2003-01-0398, (2003).
[https://doi.org/10.4271/2003-01-0398]
-
D. Rabhi, V. Rabhi, and P. Ranson, “Gear Design and Dimensioning Study for a Variable Compression Ratio Engine”, SAE 2005-01-3131, (2005).
[https://doi.org/10.4271/2005-01-3131]
-
R. Hiyoshi, S. Aoyama, S. Takemura, K. Ushijima, and T. Sugiyama, “A Study of a Multiple-link Variable Compression Ratio System for Improving Engine Performance”, SAE 2006-01-0616, (2006).
[https://doi.org/10.4271/2006-01-0616]
- P. I. Nilsson, and L. Bergsten, Internal Combustion Engine with Variable Compression, EP 0560825, (1991).
- J. R. Clarke, and R. J. Tabaczynski, Internal Combustion Engine with Adjustable Compression Ratio and Knock Control, US 6135086, (2000).
- M. Kadota, and K. Yamamoto, Internal Combustion Engine Variable Compression Ratio System, US 7527025, (2009).
- L. H. D. Gooijer, Reciprocating Piston Machine and Internal Combustion Engine, EP 1983215, (2007).
- K. E. Lawrence, W. E. Moser, S. D. Roozen-boom, and K. J. Knox, Eccentric Crank Variable Compression Ratio Mechanism, US 7370613, (2008).
- V. Rabhi, Mechanical Transmission Device for Engine with Variable Volume Displacement, US 6601551, (2003).
- S. Aoyama, K. Moteki, K. Ushijima, S. Takemura, and H. Mizuno, Internal Combustion Engine, US 7669559, (2010).
- P. Phlips, B. Steiner, K. Greiser, and U. Kramer, System and Method for Controling Crankshaft Position during Engine Shutdown Using Cylinder Pressure, US 7191756, (2007).
- J. Ehrlich, Internal Combustion Engines, US 6009845, (2000).
- O. Dachtchenko, W. Gelse, V. Kutenev, K. Magg, A. Nikitin, E. Rau, Y. Romanchev, H. Schnupke, G. T. Mkretiehian, and M. Zienko, Reciprocating Piston Internal Combustion Engine, US 6772717, (2001).
- S. Aoyama, K. Moteki, and H. Fujimoto, Piston Actuation System of V-Type Engine with Variable Compression Ratio Mechanism, US 6729273, (2004).
- K. Eto, A. Maezuru, K. Ikoma, K. Iso, Y. Okada, and M. Kinoshita, Engine Vibration Elimination System and Variable Stroke Characteristic Engine, US 7905210B2, (2011).
- S. Kono, and S. Watanabe, Variable Stroke Engine, US 20090095261, (2009).
- C. D. Nelson, Variable Stroke Engine, US 4517931, (1985).
- C. Bollig, H. J. Hermanns, T. Schellhase, and F. Windmann, Combustion Engine Having a Variable Compression Ratio, US 5595146, (1997).
- M. M. Schechter, A. O. Simko, and M. B. Levin, Variable Displacement and Compression Ratio Piston Engine, US 5136987, (1992).
- E. H. Lee, J. C. Yang, Y. H. Kwak, K. Y. Kwon, J. K. Kong, S. H. Woo, and Y. J. Won, Variable Compression Ratio Apparatus, US 7966980, (2011).
- E. H. Lee, J. K. Kong, and Y. N. Kim, Variable Compression Ratio Apparatus, US 20100000497, (2010).