PC-Crash와 교통사고 데이터베이스를 이용한 레이더각도에 따른 AEBS 적용성에 관한 연구
Copyright Ⓒ 2017 KSAE
Abstract
AEBS(Autonomous Emergency Braking System) is a system that avoids or mitigates collision by automatic braking while monitoring road conditions such as forward vehicle, pedestrian and structures. In this study, we investigated the applicability of AEBS according to radar angle in order to avoid vehicle crashes using the PC-Crash program and a traffic accident database. To simulate the program, we used the database acquired by the traffic accident information division of the National Police Agency. AEBS was implemented with the active safety function in the PC-Crash program. In addition, the system was evaluated with three Euro NCAP AEB test procedure scenarios. Results showed that the avoidance rate of vehicles varied widely according to types of accidents when applying AEBS to the actual traffic accident database. As the radar angle was increased, the avoidance rate of vehicles also gradually increased.
Keywords:
TAAS, ADAS, AEBS, TTC, PC Crash키워드:
교통사고분석시스템, 첨단운전보조시스템, 자동긴급제동시스템, 충돌시간, 피씨크래시1. 서 론
최근 국내에서 매년 많은 교통사고 사상자가 급증함에 따라 2015년 국내교통사고 통계시스템인 TAAS에 의한 자료에 의하면 사고발생건수에 추돌사고가 전체사고의 33 %를 차지하고 사망자는 횡단보도 사고가 39 %를 차지하고 있다.1) 이러한 교통사고 감소를 위해 AEBS의 개발 및 발전이 활발히 이루어지고 있다. 이러한 흐름으로 Euro NCAP에서는 2014년부터 NCAP평가 항목에 AEBS를 추가하였고, 모든 충돌안전성에서 Good 등급 및 회피 장치를 기본 장착해야 최우수등급을 받을 수 있다. 유럽연합은 2015년부터 운행거리가 긴 상용차량에 AEBS를 의무 장착하기로 하였다.2) Euro NCAP과 NHTSA의 발표 자료에 의하면 AEBS 장착 차량의 경우가 저속구간 운행 시 교통사고가 약 38 % 정도 감소하면서 교통사고 보험청구액도 약 35 % 정도의 감소효과를 보여주고 있어 교통사고를 줄이기 위한 중요한 안전시스템으로 각광을 받고 있다.3,4) 그리고 독일의 GIDAS에서는 교통사고 데이터베이스를 2,000건 이상으로 항목별 조사하여 교통사고 심층 분석을 통하여 안전장치 개발의 중요성을 제시하여 연구개발에 박차를 가하고 있다.5) 또한 전 세계적으로 교통사고 심층 분석 데이터베이스 관련 표준화에는 IGLAD가 있으며, 2010년 FISITA에서도 교통사고 데이터베이스 구축의 필요성을 제안하여 ACEA와 국제자동차 연맹과 함께 연구 진행하고 있으며, 현재 참여하고 있는 국가로는 독일, 미국, 스페인, 인도, 오스트리아, 폴란드 등으로 연구개발에 적극 참여하여 교통사고 안전장치 개발을 위한 교통사고 데이터베이스 시스템 구축에 노력을 다하고 있다.6)
관련 연구동향으로 김시우 등7)은 국내 교통사고 데이터베이스화 자료를 활용하여 유럽에서 실시하는 교통사고 데이터베이스 시스템을 적용하여 교통사고 심층 분석으로 교통사고를 감소시킬 수 있는 안전장치 활용방안을 제시하였고, 장현익 등8)은 AEBS관련 국내외 연구 및 정책현황 조사와 AEBS 안전성 평가를 위해 평가시스템을 구축하여 실차 평가를 수행하였고, 국제기준의 평가 절차를 추가하여 직선로, Cut-in과 같이 실 도로상황에서 발생하는 평가 시나리오를 체계적으로 구성하여 AEBS의 성능 및 안전성 평가방법을 정립하였으며, Vertal과 Steffan9)은 보행자 교통사고분석 자료를 이용하여 PC-Crash 프로그램에 AEBS를 적용했을 때 얻어진 해석결과와 보행자 더미를 사용한 실제 시험결과를 비교했을 때 AEBS의 충돌회피나 충돌 완화하는 모습을 보여 AEBS의 안전성을 검증하였다.
본 연구에서는 (유)삼송에서 경찰청의 교통사고14) 정보를 데이터베이스화하여 PC-Crash 시뮬레이션을 통하여 교통사고상황에 AEBS 장착 여부와 레이더각도에 따른 충돌회피 여부를 심층 분석하고자 하였다. 여기서 데이터자료는 사고개요, 사고일자, 사고유형, 사고 장소, 차량 파손사진, 사고차량제원, 속도, 제동여부, 타이어 사이즈, 탑승자 및 보행자 사상정도, PC Crash 시뮬레이션 결과 등이 있으며, 이를 ACCC라 칭한다.
2. 시뮬레이션 환경 구축
본 연구에서는 교통사고 데이터베이스 ACCC에 AEBS을 PC-Crash 프로그램에 적용하기 위해 다음과 같이 시스템을 구축하였다.
2.1 AEBS 구성
AEBS는 ADAS의 많은 안전장치 중 하나로 다른 안전장치 보다 교통사고를 가장 큰 역할로 줄일 수 있는 장치로서, Fig. 1에서 나타난 바와 같이 AEBS의 작동조건은 3단계로 구성되어 있으며 도로상황을 모니터링 하여 ① 전방물체와의 거리를 감지하고, ② 전방물체와의 거리가 가까워지면 충돌경보로 운전자에게 알리며, ③ 경보로 운전자가 제동하지 않았을 시 자동제동을 제공함으로써 충돌을 회피하거나 충돌을 완화시켜주는 안전시스템이다. 또한 AEBS는 Fig. 2에 나타난 바와 같이 센서부의 카메라와 77 GHz의 레이더센서가 장착되어 있다.

AEBS method of operation

AEBS sensor devices
카메라는 전방 물체가 차량, 보행자, 구조물인지 감지하고, 레이더센서는 전방 물체까지의 거리를 인식하며 ECU부에서 제어여부를 판단하여 액추에이터부에서 제동을 하는 시스템이다.
Fig. 3은 AEBS의 작동조건의 알고리즘을 나타낸 것이다.10) 여기서 TTC는 상대속도와 상대거리의 비로 충돌시간을 나타낸 것이고, TTCmin은 상대속도와 제동거리의 비로 충돌회피 가능한 최소시간으로 다음과 같은 식으로 계산된다. TTC와 TTCmin의 비교를 통해 TTC 값이 TTCmin보다 작을 경우 브레이크가 작동하는 알고리즘 형태로 구성되어 있다.
| (1) |
| (2) |

AEBS algorithm
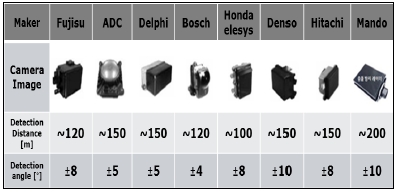
본 연구에서는 시뮬레이션에 AEBS를 적용하기 위한 장치 중 카메라는 전방물체 인식으로 시뮬레이션에 제외하였고, Table 1에서 나타난 바와 같이 제조사별 레이더센서의 사양을 나타낸 것이다. 여기서 탐지거리는 최소 100 m에서 최대 200 m까지이고, 탐지각도는 최소 ±4o에서 최대±10o까지 시뮬레이션 시 탐지각도 ±2o씩 증가하였고, 탐지거리는 TTC의 작동조건의 최소 값 100 m로 적용하였다.

Radar sensor of manufacturing companies
2.2 AEBS 적용
AEBS를 적용할 프로그램은 PC Crash v.11.0으로 차량 충돌 전, 후의 시뮬레이션이 가능하며 전 세계적으로 교통사고분석에 널리 사용하는 강체충돌 프로그램으로서 국내외의 다양한 차량데이터와 도로환경 구현이 가능하여 교통사고와 같은 시나리오 구성이 가능한 장점이 있다. PC-Crash의 기본 충돌모델은 운동량의 2, 3차원 모델이며, Newton의 운동량보존법칙을 기반으로 시뮬레이션이 가능하다.11) 본 연구의 AEBS 재현을 위해 Fig. 4에서 나타난 바와 같이 PC-Crash의 기능 중 Active Safety로 활용하게 되며, 각 블록은 Visual basic의 형태로 되어 있어 코딩을 통해 수정이 가능하고, Fig. 4의 Distance Sensor 블록에서 탐지거리와 탐지각도를 수정하여, EmBrake블록으로 AEBS의 알고리즘을 기반으로 적용할 수 있다.

Active safety function of PC Crash
2.3 AEBS 시뮬레이션 시나리오
실제 교통사고 데이터베이스에 AEBS를 적용하기 전 PC-Crash의 Active Safety기능 적합성 여부 확인을 위한 시뮬레이션을 수행한다. 확인방법은 Euro NCAP의 AEBS 시나리오 조건12,13)에 맞게 총 3가지로 Fig. 5~7에 나타난 바와 같이 각 상황에 따라 AEBS 시나리오로 시뮬레이션을 수행하였다. Fig. 5는 AEBS City로 우측의 검은색의 타깃 차량은 정차한 상태에서 시험차량이 v0의 속도로 진행하는 저속시험 시나리오이고, Fig. 6은 Inter-Urban으로 3가지로 분류되어 있고 CCRs는 City시험와 동일하게 타깃 차량은 정차하고 있으며, 시험 차량속도는 중·고속조건이다. CCRm는 타깃 차량이 20 km/h의 속도로 저속·정속주행하며 진행하는 시험시나리오이다. CCRb는 시험차량과 타깃 차량의 사이 거리가 12 m, 40 m로 고정되어 있으며, 두 차량이 동일한 50 km/h의 속도로 진행하며, 타깃 차량이 2, 6 m/s2의 감속도로 제동하는 시험이다. Fig. 7은 보행자 시험시나리오로서 3가지로 분류되어 있으며, CVFA는 성인 보행자 더미가 8 km/h의 속도로 반대 차선에서 시험차량의 폭 50 % 중앙에 충돌할 수 있게 지정하여 진행하는 시험이고, CVNA 25 %, 75 %는 성인 보행자 더미가 5 km/h의 속도로 시험차량 조수석방향에서 진입하고 차량 폭 25 %, 75 %에 충돌하는 시나리오방식이다. 또한 CVNC는 어린이 보행자 더미가 시험차량 앞에 두 차량으로 가려진 곳에서 속도 5 km/h의 속도로 진입하여 차량 폭 50 % 중앙으로 충돌할 수 있게 진행하는 시나리오이다. 성인 더미와 어린이 더미의 치수는 Fig. 8과 Fig. 9에 나타내었다. 여기서 보행자 더미는 Euro NCAP 조건과 같이 설정하였고,13) Euro NCAP의 조건에 맞게 더미의 사이즈, 무게와 같은 제원으로 설정하였으며, 적용 차량은 2016년 국내 준형차량 판매순위에서 1위를 차지한 현대자동차(주)의 쏘나타 차량의 제원으로 시뮬레이션을 하였다.

AEBS city scenario of Euro NCAP test method

AEBS inter-urban scenario of Euro NCAP test method

AEBS VRU-Pe scenario of of Euro NCAP test method

Euro NCAP adult pedestrian target

Euro NCAP child pedestrian target
3. 결과 및 고찰
Fig. 10 ~ 12는 AEBS 시나리오 3가지 City, Inter-Urban, VRU-Pe에 대한 PC-Crash의 시뮬레이션 방법을 도시한 것이고, Table 2~4는 시뮬레이션 결과를 나타낸 것이다. 여기서 왼쪽의 차량은 시험 차량이고, 오른쪽의 타깃 차량과 타깃 보행자 더미는 충돌조건으로 진행하는 시나리오를 나타낸 것이다. 본 연구에서는 Euro NCAP AEBS 시나리오12,13)에서 시험차량의 속도 5 km/h 씩 증가 시 71개의 시나리오로 레이더각도 4°, 6°, 8°, 10°로 4가지로 분류하였을 때 총 284개의 전체 시나리오를 나타낼 수 없어 AEBS 시나리오 3가지 City, Inter-Urban, VRU-Pe의 마지막 시나리오만 도시한 것이다.

Euro NCAP city scenario

Euro NCAP inter-urban scenario

Euro NCAP VRU-Pe scenario
AEBS city scenario results
Table 2는 AEBS City 시나리오 결과로서 시험 차량속도는 10 km/h에서 50 km/h까지 5 km/h씩 증가시켰다. ○의 표시는 충돌되지 않는 충돌 이전에 시험차량이 정지한 것을 나타내며, 이 시나리오는 모두 레이더각도와 시험 차량속도와 무관하게 충돌회피하는 것으로 실제사례의 선행차가 정차하고 있을 시의 추돌상황일 때 충돌회피가 가능하다는 것을 확인하였다. Table 3은 AEBS Inter-Urban 시나리오 결과를 나타낸 것으로 N/A(Not Applicable)라 표기한 것은 시나리오와 해당사항이 없는 것을 나타낸다.
AEBS scenario inter-urban results
그 결과로 CCRs, CCRm, CCRb의 시나리오 결과로 대부분 충돌회피를 하였지만 CCRb의 시험차량과 타깃 차량과의 거리 12 m, 타깃 차량의 감속도 6 m/s2의 경우 숫자로 표기 한 것은 충돌회피를 못하는 것을 나타낸 것이며, 충돌했을 당시 시험차량의 속도를 나타낸 것이다. 그 결과로 CCRb의 14 km/h로 충돌이 일어났던 4가지 시나리오는 모두 레이더각도와는 무관하게 14 km/h의 같은 속도로 충돌회피를 못하였지만 시험차량의 처음속도보다 72 %의 감속으로 충돌 완화하였다.
Table 4는 AEBS VRU-Pe인 보행자 충돌 시나리오 결과를 나타낸 것으로 레이더각도에 따라 다른 결과가 나타났다. CVFA 시나리오에 레이더각도 4o, 6o는 충돌회피를 못하였지만 시험차량의 초기속도보다 감소한 것을 확인할 수 있었고, CVNA 25 % 시나리오는 레이더각도 4o일 때 X로 표기로 제동을 하지 않은 상태에서 충돌한 경우를 나타낸 것이며, 시험차량의 초기속도와 충돌 당시 시험 차량속도가 같은 것으로 레이더각도 4o의 경우는 보행자를 감지하지 못하는 것으로 사료된다. CVNA 75 % 시나리오는 모든 사례가 충돌 회피하는 것으로 나타났고, CVNC 시나리오는 레이더각도 4o일 때 시험차량 50 km/h 이하의 속도에서는 충돌회피를 못하였지만 충돌속도는 시험차량의 초기속도보다 감소한 것을 확인할 수 있었다. 이러한 자료를 기반으로 실제 교통사고 데이터베이스 ACCC에 AEBS 적용 시 모든 교통사고 사례에서 충돌 회피하는지 또는 충돌 완화하는지를 레이더각도에 따라 적용할 수 있었다.
AEBS scenario VRU-Pe results
4. AEBS 실제사례 적용
Fig. 13은 실제 교통사고사례에 AEBS를 적용한 결과를 나타낸 것이다. 여기서 위 그림은 AEBS를 적용하지 않은 경우이고, 아래 그림은 실제사례에 AEBS를 적용한 경우이다.

Real case 1 applied AEBS
사고개요는 왼쪽 끝에서 진행하던 차량(카니발)이 야간에 주행 중 횡단보도를 벗어나 보행 중이던 보행자를 늦게 발견하여 제동은 하였지만 충돌한 사례로 주행속도 46.5 km/h, 충돌속도 28.9km/h로 충돌지점에 원 체크무늬로 나타내었다. AEBS의 탐지거리 100 m, 탐지각도 4o를 적용한 결과 충돌지점 이전에 완전히 정차한 것으로 충돌 회피하는 것으로 보행자 충돌사례를 나타내고 있다.
Fig. 14의 사고개요는 왼쪽에서 진행하는 차량(아반떼)이 주행속도 91 km/h의 속도로 과속주행 중 오른쪽에서 진행하던 차량(스포티지)이 좌회전 신호에 좌회전 중 아반떼 차량이 과속과 신호위반으로 충돌한 사례를 나타낸 것으로 이때 주행속도 91 km/h, 충돌속도 37.8 km/h이다. AEBS의 탐지거리 100 m, 탐지각도 4o를 적용한 결과로 아래 그림은 충돌지점 이전에 아반떼 차량이 정차한 것으로 교차로 충돌사례를 나타내고 있다.

Real case 2 applied AEBS
Fig. 15의 사고개요는 좌회전 차선에서 대기 중 이던 차량(소나타)과 직진차선에서 주행 중 이던 차량(소나타)이 좌회전 대기 중이던 차량에 가까이 다가왔을 때 급격하게 좌회전차선에서 직진차선으로 이동 중 충돌한 사례로 직진차선에서 주행 중 이던 차량의 주행속도는 55 km/h, 충돌속도 44.3 km/h이다. 실제사례에 탐지거리 100 m, 탐지각도 10o의 AEBS를 적용한 결과로 충돌지점 이전에 완전 제동한 것으로 추돌사고사례를 나타내고 있다.

Real case 3 applied AEBS
Fig. 16의 사고개요는 1차선에서 진행 중이던 차량(아반떼)이 좌회전차선으로 이동 중 2차선에서 진행 중 이던 차량(소나타)이 좌회전 차선으로 급격하게 두 차선을 한 번에 변경하면서 일어난 충돌사례이다. 1차선에서 진행 중이던 아반떼 차량의 주행속도 30 km/h, 충돌속도 29.7 km/h로 이 사례에 탐지거리 100 m, 탐지각도 10o의 AEBS를 적용한 결과로 실제사례와 0.1 km/h의 차이로 AEBS가 작동을 못한다는 것으로 차선변경사례를 나타내고 있다. 이러한 모든 차량충돌사례에 레이더각도에 따라 AEBS를 적용한 결과는 Table 5에 나타내었다.

Real case 4 applied AEBS
AEBS results applied real case
그 내용으로서 교통사고 사례유형은 교차로 충돌, 보행자 충돌, 추돌, 차선변경충돌로 4가지로 한 사례에 레이더각도 4o, 6o, 8o, 10o의 변수와 두 차량 모두 AEBS를 적용하여 시뮬레이션을 하였다. 교통사고사례는 총 30가지이고, 레이더각도에 따라 4가지로 분류하였으며, 두 차량 모두 AEBS를 적용한 것으로 총 144개의 시뮬레이션 결과를 얻었다. 여기서 N/A는 추돌사고와 같이 추돌당한 앞 차량에 AEBS를 적용해도 의미가 없으며 보행자 충돌사례에 보행자에게 AEBS를 적용을 못하는 의미를 나타낸 것이다. Non의 의미는 실제사례에서 AEBS가 장착되지 않은 차량에서 충돌속도이며, No.는 교통사고 사례번호이고, 레이더각도는 4o, 6o, 8o, 10o로 적용하였다. 그 결과로, 교차로 충돌사례의 No. 12의 경우를 보면, 레이더각도에 따라 각도가 높을수록 충돌속도가 점차 감소하며 레이더각도 10o일 때 충돌회피가 나타남을 확인할 수 있었다.
Fig. 17은 4가지의 교통사고 사례유형에 대하여 충돌회피율을 분석하여 나타낸 것이다. 그 결과로 충돌회피율을 종합하면 교차로사례의 경우는 24 %정도의 충돌회피율을 나타냈으며, 보행자 충돌사례 및 추돌사례의 AEBS 적용결과로 100 %의 충돌회피율을 나타냈고, 차선변경사례는 AEBS의 레이더센서 탐지 이전에 충돌이 이루어지는 것으로 충돌회피율 0 %로 나타나 AEBS로 충돌회피가 어렵다는 것을 확인할 수 있었다. 따라서 가장 많은 교차로사례에서 24 %의 충돌회피율을 심층 분석하기 위해 레이더각도를 변수로 1o씩 증가시켜 추가 시뮬레이션을 진행한 결과로 Table 6에 나타내었다.

Collision avoidance rate in real case
Additional simulation results for inter section
여기서 레이더각도는 충돌회피가 가능한 각도이다. 추가 시뮬레이션한 결과를 레이더각도별 충돌회피율을 분석하여 Fig. 18에 나타내었다. 그 결과로 교차로 충돌사례 추가 시뮬레이션을 통하여 AEBS의 레이더 각도가 올라갈수록 충돌회피율이 점진적으로 증가하는 것을 확인할 수 있었다. 레이더 탐지각도별 분석으로서, 10o일 때 24 %의 충돌회피율을 나타나며, 20o에서 30o로 올릴 때 다른 레이더각도의 상승율보다 훨씬 높은 47 %의 충돌회피율을 나타났으며, 50o일 때 100 %의 충돌회피율을 나타나보였다.

Collision avoidance rate as to additional simulation
5. 결 론
본 연구에서는 AEBS를 국내 교통사고사례 적용에 따른 충돌회피에 대한 연구를 고찰하기 위해 Euro NCAP의 AEBS 평가방법조사와 교통사고 분석 프로그램 PC-Crash를 이용하여 실제 교통사고 데이터베이스에 AEBS를 적용한 결과는 다음과 같다.
- 1) PC-Crash로 Euro NCAP AEBS 시험의 City, Inter-Urban의 경우, 레이더각도와 시험차량의 속도와는 무관하게 충돌회피 및 충돌 완화하였고, 보행자 시나리오 AEB VRU-Pe의 경우 레이더각도에 따라 충돌회피와 충돌완화가 다른 것을 확인하였으며, 레이더각도 4o의 경우는 보행자 더미를 탐지를 못하였다.
- 2) 실제 교통사고사례 ACCC에 AEBS를 적용한 결과로 교차로충돌사례는 각 차량의 충돌상황에 따라 충돌회피하지 않음을 확인하였고, 보행자충돌 및 추돌 사례는 100 % 충돌회피 하였으며, 차선변경사례는 모든 사례가 충돌회피를 하지 못하였다.
- 3) 심층 분석을 위한 교차로충돌사례 추가 시뮬레이션 결과로 레이더각도를 20o에서 30o로 올린 구간이 가장 높은 충돌회피 상승률을 나타내었다.
본 연구에서 Euro NCAP의 AEBS 평가항목을 모두 만족하였더라도 교통사고사례에서는 100 % 충돌회피 못함으로 나타나 국내 교통상황에 따른 AEBS의 평가항목에 대한 보완이 필요할 것으로 사료되며, 지속적으로 국내 실제교통사고데이터베이스를 활용하여 AEBS 및 첨단운전보조시스템 적용성에 연구가 진행된다면 신뢰성은 향상될 것으로 사료된다.
Nomenclature
| ACCC : | automotive collision case catalog |
| ACEA : | european automobile manufacturers association |
| ADAS : | advanced driver assistance system |
| AEBS : | autonomous emergency braking system |
| BSD : | blind spot detection |
| CCRb : | car to car rear braking |
| CCRm : | car to car real moving |
| CCRs : | car to car real stationary |
| CVFA : | car to VRU farside adult |
| CVNA : | car to VRU nearside adult |
| CVNC : | car to VRU nearside child |
| FISITA : | the international federation of automotive engineering societies |
| GIDAS : | gemany in-depth accident study |
| LDWS : | lane departure warning system |
| IGLAD : | initiative for the global harmonization of accident data |
| NCAP : | new car assessment program |
| NHTSA : | national highway traffic safety administration |
| TAAS : | traffic accident analysis system |
| TTC : | time to collision |
| VRU : | vulnerable road user |
Acknowledgments
A part of this paper was presented at the KSAE 2017 Spring Conference
References
- KoROAD, Traffic Accidents by Type of Accident per Month, http://taas.koroad.or.kr/sta/acs/exs/typical.do?menuId=WEB_KMP_STA_UAS_PDS (2017).
- HYUNDAI MOTOR GROUP, Safety Device to Prevent Collision Accident Evolution of Automatic Emergency Braking System, http://www.hmgjournal.com/Tech/Item/Reissue-aeb-upgrade.blg (2017).
- EURO NCAP, Study Confirms High Effectiveness of Low Speed Autonomous Emergency Braking(AEB), http://www.euroncap.com/en/press-media/press-releases/study-confirms-high-effectiveness-of-low-speed-autonomous-emergency-braking-aeb/ (2017).
- NHTSA, DOT and IIHS Announce Historic Commitment From 10 Automakers to lnclude Automatic Emergency Braking on All New Vehicle, https://www.nhtsa.gov/press-releases/dot-and-iihs-announce-historic-commitment-10-automakers-include-automatic-emergency (2017).
- Y. H. Youn, S. W. Kim, and J. W. Lee, “A Feasbility Study of Establishing Korean In-Depth Accident DB”, KSAE Spring Conference Proceeding, p1347-1354, (2013).
-
S. W. Kim, J. W. Lee, and Y. H. Young, “A Study on the Construction of the Database Structure for the Korea In-depth Accident Study”, Transactions of KSAE, Vol.22(No.2), p29-36, (2014).
[https://doi.org/10.7467/ksae.2014.22.2.029]

- S. W. Kim, J. W. Lee, B. D. Kang, Y. H. Youn, and M. W. Suh, “A Study on the Construction of the Database Structure for the Korea In-Depth Accident Study & Consideration of GIDAS”, KSAE Spring Conference Proceeding, p1355-1361, (2013).
-
H. I. Jang, S. W. Cho, and B. J. Yong, “The Safety Evaluation Method of Advanced Emergency Braking System”, Transactions of KSAE, Vol.21(No.5), p162-168, (2013).
[https://doi.org/10.7467/ksae.2013.21.5.162]
- P. Vertal, and H. Steffan, “Evaluation of the Effectiveness of Volvo’s Pedestrian Detection System Based on Selected Real-Life Fatal Pedestrian Accidents”, SAE 2016-01-1450, (2016).
- H. G. Mun, G. G. Kim, and B. W. Kim, “AEB System for a Curved Road Considering V2Vbased Road Surface Conditions”, Ubiquitous Science and Engineering, Vol.86, p8-13, (2015).
- PC-Crash Inc., PC-Crash 11.0 Operating and Technical Manual, (2016).
- Euro NCAP, TEST PROTOCOL - AEB System, Version 1.1, (2015).
- Euro NCAP, TEST PROTOCOL - AEB VRU System, Version 1.0.1, (2015).
- Y. S. Choi, S. R. Baek, S. H. Kim, J. K. Jung, J. G. Lim, and J. K. Yoon, “A Study on the Applicability of AEBS using Traffic Accident Database”, KSAE Spring Conference Proceeding, p822, (2017).