고신뢰 자율주행을 위한 악의 조건 측위성능 평가 시나리오 설계 방법 연구
Copyright Ⓒ 2023 KSAE / 217-11
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
In order for autonomous vehicles to drive safely on real roads, the role of high-definition maps is becoming increasingly important, and so is the importance of positioning technology. Since precise localization is an indispensable element of autonomous driving systems that recognizes the vehicle’s surroundings and determines its current location, the performance of localization should be evaluated not only in normal driving situations, but also in harsh driving situations that limit the ability to perceive the surroundings. In this study, we propose a methodology for building risk scenarios for the evaluation of localization performance in adverse driving conditions. To accomplish this, we define adverse conditions that affect the positioning performance of autonomous systems, break them down into perception related causal factors, and specify the effect of each on the physical and functional properties of sensors to derive risk scenarios caused by adverse conditions. In addition, by combining various scenarios with sensor specific perception limitations to build an integrated scenario, we found that realistic and efficient performance evaluation is possible.
Keywords:
Hyper localization, Sensor limitation, Scenario-based evaluation, Adverse driving condition, Simulation키워드:
하이퍼 측위, 센서 제약, 시나리오 기반 평가, 악의 조건, 시뮬레이션1. 서 론
전통적인 자동차 제조기업뿐만 아니라 IT 기업들도 자율주행 차량의 핵심 기술을 개발하기 위해 글로벌 경쟁을 펼치고 있다. 또한, 각 나라의 특성에 맞게 자율주행 기술을 검증할 수 있는 다양한 인프라를 구축하고 있으며 이를 뒷받침하는 제도적 지원도 마련되고 있다.1-3) 자율주행 차량이 실제 도로에서 운행되기 위해서는 안전성이 확보되어야 하므로 개발 단계에서부터 이를 확인하기 위한 실증연구와 요소 기술의 평가를 위한 방법이 요구된다.4) 자율주행시스템이 현실 세계에서 겪을 수 있는 다양한 위험 상황에 대응하는 방식과 그것을 구성하고 있는 요소 기술의 성능을 평가하기 위해서 시나리오 기반의 접근 방법이 요구되며 이러한 평가 방식은 현실에 존재하는 다양한 변수를 효율적으로 처리하는 데에 유용하게 활용될 수 있다.5-8)
측위 기술은 차량의 현재 위치를 파악하는 기술로서 레벨 3 이상의 자율주행시스템이 최적의 기동을 수행하는 데에 필수불가결한 요소이다. 그러므로 측위 기술의 성능은 정상적인 주행 상황뿐만 아니라 주변 환경을 인지하는 데 제약이 발생하는 악조건 상황을 고려하여 평가되어야 한다. 주행 악조건 상황에서 측위 기술을 평가하는 것은 현 자율주행 단계에서의 기능적 강건함을 확인하는 데에 활용될 수 있으며 또한, 운행설계영역이 확장됨에 따라 보다 다양한 상용 서비스의 가능성을 확인하는 데에 활용될 수 있다. 자율주행 기술의 평가에서와 같이 측위 기술을 검증하는 데에도 시나리오에 의한 평가 절차를 따르는 것이 효과적이다. 시나리오를 논리적인 구조로 구성하기 위해서는 현실에서 발생할 수 있는 각종 위험 요소를 유형별로 분류하고 이들이 주변 환경을 인지하는 물리적, 기능적 특성에 끼칠 수 있는 영향을 관련 지어 분석하는 과정이 요구된다.
다양한 연구 그룹에서 자율주행 기술의 검증을 위한 시나리오 생성9)과 시나리오 구현을 위한 시뮬레이션 환경에 관한 연구10)가 진행되고 있으나 일반적인 운행설계영역을 벗어나는 주행 악조건에서 측위 기술을 평가하는 연구는 거의 이루어지지 않고 있다. 이에 본 연구에서는 자율주행시스템이 주변 환경을 인지하는 데에 제약이 발생하는 악의 조건 하에서 정밀 측위 기술을 평가, 검증하기 위한 시나리오를 생성하는 방법을 제시하고자 한다. 구체적으로, 미국자동차기술학회(Society of Automotive Engineers, SAE)에서 정의한 자율주행 기술 단계11) 중에서 레벨 4에 해당하는 자율주행시스템에 요구되는 측위 기술을 평가하기 위한 시나리오를 도출하는 것을 목표로 하고 있다. 이를 위해 자율주행시스템의 평가 시나리오 구성에 관한 표준인 ISO3450212)를 참고하여 측위시스템에 발생할 수 있는 악의 조건 상황을 정의 및 분류하고 각 상황에서의 위험 시나리오를 수립하는 과정을 구축하고자 한다. 이를 위해 카메라(Camera), 라이다(Lidar), 레이다(Radar) 등 다양한 센서에 관한 위험 인과 요인과 해당 요인이 각 센서의 물리적, 기능적 특성에 끼치는 영향을 구조적으로 분석하며 이로부터 발생가능한 위험 시나리오를 생성하는 방식을 제안한다. 또한, 위험 시나리오를 유연하게 조합함으로써 측위 기술 성능 평가지표의 적정성 확인과 더불어 평가 방식의 재사용성을 높이는 환경을 구축하였다.
2. 자율주행 측위에 영향을 미치는 악의 조건
2.1 악의 조건의 정의
차량의 안전한 운행 상황에 영향을 미치는 악의 조건은 ‘의도하지 않는 동작과 기능을 유발하여 차량 수준의 위험으로 이어지게 하는 것’ 또는 ‘위험의 발생을 직접 트리거 시키는 조건’으로 정의할 수 있다. 본 연구에서는 다양한 악의 조건 중에서 자율주행시스템의 측위 기능에 영향을 끼치는 것을 고려 대상으로 한다. 정상적인 측위 동작을 포함한 허용 가능한 차량의 모든 동작의 집합은 ODD(Operational Design Domain, 운행 설계 영역)내에서 다루어져야 한다. 자율주행시스템이 악의 조건 상황에서 발생한 의도하지 않은 동작이나 허용 가능한 오작동을 처리할 수 없는 경우는 시스템의 기능 불충분에 기인한 것으로 간주할 수 있지만 ODD를 완전하게 정의할 수 없다는 한계로 인해 ODD를 벗어나는 것과 시스템의 기능 부족 사이의 경계는 모호할 수 있다.13) 악의 조건을 분석하는 것은 해당 조건이 자율주행시스템의 측위기능에 미치는 영향을 파악하기 위한 것이므로 이러한 목적을 달성하기 위한 도구로서의 위험 시나리오(Critical Scenario)의 개념이 수반된다. 위험 시나리오는 위해(Harm)를 초래할 수 있는 모든 시나리오로 정의될 수 있으며 위험 시나리오를 식별하는 과정은 위험 상황을 트리거 하는 조건을 찾거나 안전에 위해를 끼칠 수 있는 동작 상황을 찾는 것 또는 이 둘의 조합을 발견하는 것이므로 본 연구에서 지칭하는 악의 조건은 위험 시나리오 구축의 전제 조건이 된다. 환언하면, 측위 동작에 위험 상황을 초래하는 악의 조건을 활용하여 위험 시나리오를 구축할 수 있다는 의미가 된다. 일반적으로 위험 시나리오는 ODD 내에서 식별되고 구체화되지만 앞서 서술한 바와 같이, 특정한 조건이 ODD를 벗어나는 상황과 시스템이 그 조건 하에서 정상적인 기능을 수행할 수 없는 것 간에는 뚜렷한 구분이 어렵기 때문에 위험 시나리오가 ODD 정의에서 고려되지 않은 측면을 가리킬 수도 있다. 결과적으로, 확장된 영역을 포함하여 측위 성능을 평가하고 검증하는 과정은 측위 기능을 개선하는 데에 도움을 줄 뿐만 아니라, ODD 정의를 새로 갱신하는 과정으로 이어지므로 이의 완성도를 높이게 된다.13) 한편, 측위 기능의 개선으로 ODD가 변경되면 이를 기반으로 하는 새로운 위험 시나리오가 도출될 수 있으므로 재귀적인 선순환이 형성될 수 있다.
2.2 악의 조건의 구성 요소
본 연구는 자율주행시스템이 위치 파악을 위해 주변 환경을 인지하는 것에 제약을 가하는 조건 특히, 차량에 설치된 다양한 센서가 주변 상황을 인지하는 데에 제한을 가함으로써 센서의 의도하지 않는 동작, 기능을 유발하여 차량 레벨의 위험으로 이어지게 하는 것 또는 직접적인 위험 발생을 트리거하는 악의 조건에 중점을 두며, 이를 인지 관련 위험 인과 요인으로 세분화하고 각 센서에 미치는 영향을 구체화함으로써 악의 조건에 의한 위험 시나리오를 도출한다.
인지에 제약을 가하는 요소로서 차량과 센서 간의 관계, 주변 환경에 의한 것, 인식 대상에 연유한 것으로 분류할 수 있다.12) 차량과 센서 간에 존재할 수 있는 위험 요인은 센서의 부착 상태를 불안정하게 만드는 차량의 거동, 센서 자체의 손상과 성능 저하 등이 있으나 본 연구에서는 이를 제어 가능한 요소라 판단하여 논의에서 제외하였다. 이와 같은 가정 하에 Fig. 112)과 같이, 주변 환경과 인지 대상체(인지 타겟)라는 두 가지 범주에 대하여 인지 제한과 관련한 위험 요인을 발굴하고자 한다. 주변 환경은 인지 대상을 파악하는 행위를 방해할 수 있는데 이와 관련한 인지 위험 요인으로 도로와 같은 구조물, 센서와 인지 대상 사이의 공기와 같은 전달 매질 내에 존재하여 센서가 목표물을 감지하는 데에 영향을 끼치는 매질 내 요소 그리고 차량 주변의 객체로 분류할 수 있다. 구조물은 도로 자체, 도로 주변의 구조물, 도로 상단에 위치한 구조물로 분류할 수 있으며 전달 매질과 관련한 요소는 대기 중의 입자 상 물질인 안개, 매연, 강우, 강설 등과 역광 등 부정적인 영향을 미치는 광원 등이 포함된다. 주변 객체에는 도로 표면, 주변 차량, 도로변 물체, 고가 구조물과 관련된 요소가 포함된다. 인지 목표와 관련한 위험 요인은 도로, 교통 정보, 도로상 장애물, 움직이는 객체로 분류되며, 측위 성능의 평가에서는 도로상 물체를 고려할 필요가 없으므로 본 연구에서는 이를 제외하였다. 도로에는 차로, 도로 가장자리가 포함되며, 교통 정보는 신호등, 도로 표지판 및 노면 표시로 구성된다. 이동 중인 객체에는 다른 차량, 오토바이, 자전거, 보행자 및 동물을 포함한 다른 교통 참가자로 구성된다.

Breakdown of risk factors for perception limitations
3. 악의 조건과 센서 성능의 상관관계
3.1 자율주행차량용 센서 시스템 개요
자율주행시스템의 운행 기능은 인지, 위치 파악 및 매핑, 경로 계획, 의사 결정, 차량 제어의 다섯 가지 요소로 구성된다.14) 본 연구는 인지 기능상의 제약이 위치 파악에 끼치는 영향을 관심의 대상으로 삼고 있으므로 다섯 가지 구성 요소 중에서 인지와 위치 파악을 중점적으로 다루고자 한다. 인지는 센서를 활용하여 인간의 감각과 유사하게 차량 외부 환경을 지속적으로 관찰하고 이해하는 것이며 위치 파악 및 매핑은 자율주행차의 위치를 계산하고 센서 데이터와 기타 인지 정보를 활용하여 환경을 매핑하는 기능적 요소이다. 본 연구에서는 인지의 수단으로서 센서의 역할과 센서가 가진 물리적, 기능적 특성에 관한 이해를 통해 악의 조건에 의해 유발된 센서의 인지 한계 상황을 분석하고 이를 포함하는 위험 시나리오를 도출하고자 한다.
인간 운전자와 마찬가지로 자율주행차는 주변 환경을 지속적으로 관찰하고 연석, 장애물, 교차로 등 기준에 의한 지역적 위치와 거리, 도시 등 광역적 단위의 위치를 정확하게 계산할 수 있어야 하며 자율주행차에 이러한 기능을 제공하기 위해 차량 내부와 외부에 센서가 설치된다.15) 차량은 다양한 센서를 사용하여 차량의 위치를 결정할 뿐만 아니라 노면 표시, 도로 경사, 교통 표지판, 기상 조건, 다른 차량을 포함한 장애물의 상태를 감지한다. 위치 정밀도를 높이거나 다양한 측위 악조건에서 위치 데이터 획득의 안정성과 신뢰성을 높이기 위해 동종 또는 이종 센서 간에 탐지 구간을 중첩시키고 다양한 센서의 데이터를 융합하는 방향으로 센서 운용 방식이 발전하고 있다. 일반적으로 라이다, 레이다, 카메라 센서가 자율주행시스템에 가장 널리 사용되는 센서이며 각 센서마다의 고유의 물리적 특성을 기반으로 차량 주변의 정보를 제공한다.
라이다는 레이저 펄스를 방출한 후 인지 대상 물체에서 반사되어 센서로 돌아오는 펄스를 활용하여 차량 주변 환경에 대한 입체적인 지도를 생성할 수 있게 한다. 일반적으로 라이다 센서는 정밀도가 높지만 상대적으로 고가이며 먼지, 연기, 농무 등 일부 환경적 요인의 영향을 받을 수 있다. 레이다 센서는 전자기파를 방출하고 나서 인지 대상 물체에 반사된 신호를 수신하여 감지된 물체의 위치, 속도, 방향을 파악한다. 레이다 센서는 라이다 센서 보다 더 먼 거리의 물체를 감지하는 데 유용하며 라이다 및 카메라 센서에 비해 더 넓은 범위의 기상 환경에서 작동한다는 장점을 지닌다. 그러나 레이다 센서의 해상도가 라이다나 카메라 센서보다 낮기 때문에 작은 물체의 식별과 유사한 물체의 구분에 한계를 지닌다. 카메라 센서는 자율주행시스템의 필수적인 인지 도구로서 주변 차량, 보행자, 신호등, 노면 표시, 도로 표지판 등을 감지하고 식별하는 데 사용된다. 고해상도의 정보를 제공한다는 장점이 있으나 저조도 환경에서의 운용에서 한계를 보인다.
3.2 악의 조건에 기인한 센서별 인지 제약과 관련된 물리적, 기능적 특성
악의 조건에 의한 여러 위험 인과 요인이 센서 고유의 물리적, 기능적 특성에 영향을 끼쳐 인지 성능을 저하하는 상황이 발생할 수 있다. 위험 인과 요인과 관련한 물리적, 기능적 특성은 센서로 하여금 인지 대상을 감지할 수 있게 하는 매체인 센서 신호 자체를 ‘인식하는 과정’과 수집된 신호를 ‘처리하는 과정’의 관점으로 나누어 분석할 수 있다. 센서 신호는 전자기적 또는 광학적 신호의 형태를 가진다. 각 센서에서의 인지 방해 요인을 도출하는 과정은 신호의 인지와 인식 과정으로 나누어 진행할 수 있으며 다양한 센서에 공통적으로 적용할 수 있는 전개 방식이다. 신호를 인지하는 측면에서의 제한 요소는 인지 목표 대상으로부터 획득한 신호에 포함된 것과 원치 않은 대상으로부터 획득한 신호에 포함된 것으로 나눌 수 있다. 신호를 인지한 후에 처리하는 측면에서의 제한 요소는 데이터의 처리 능력에 기인한 것으로 볼 수 있다.
3.3 악의 조건에 기인한 카메라 센서의 인지 성능 저하
카메라 센서와 관련하여 인지 타겟으로부터 획득한 신호에 내재된 인지 제한 또는 방해 요인은 Fig. 2와 같이 카메라 영상에서 나타나는 저휘도, 저채도 상황과 휘도 레벨의 포화 등 부적절한 휘도/색도에 의한 현상이 포함되며, 광학적인 것으로 렌즈에서 발생하는 플레어가 고려될 수 있다.

Physical and functional characteristics of the camera sensor associated with perception risk factors
Fig. 2에서 인지 타겟으로부터 획득된 신호 성분은 S(Signal)로 표기하였으며 인지 타겟 이외의 것에서 획득된 신호는 잡음 N(Noise)과 원치 않는 신호 요소인 U(Undesired signal)로 표기하였다.
이 중에서 잡음의 유입은 ‘신호(S) 대 잡음(N)의 비(Signal to Noise Ratio, S/N)’를 떨어뜨리게 되며, 원치 않은 대상으로부터의 신호 유입은 ‘타겟으로부터의 신호(S) 대 원치 않는 신호(U)의 비율(Signal to Undesired Signal Ratio, S/U)’을 떨어뜨리는데 기여하게 된다. 인식 과정의 처리 능력 측면에서 도출해야 할 인지 제한 요인은 측위 기술이 활용해야 할 데이터가 부족한 상황과 카메라 신호의 처리에 특화된 것으로서 주변 조도 상황에 따라 영상 신호의 증폭도가 바뀌는 속도가 민첩하지 않은 상황이 대표적이다.
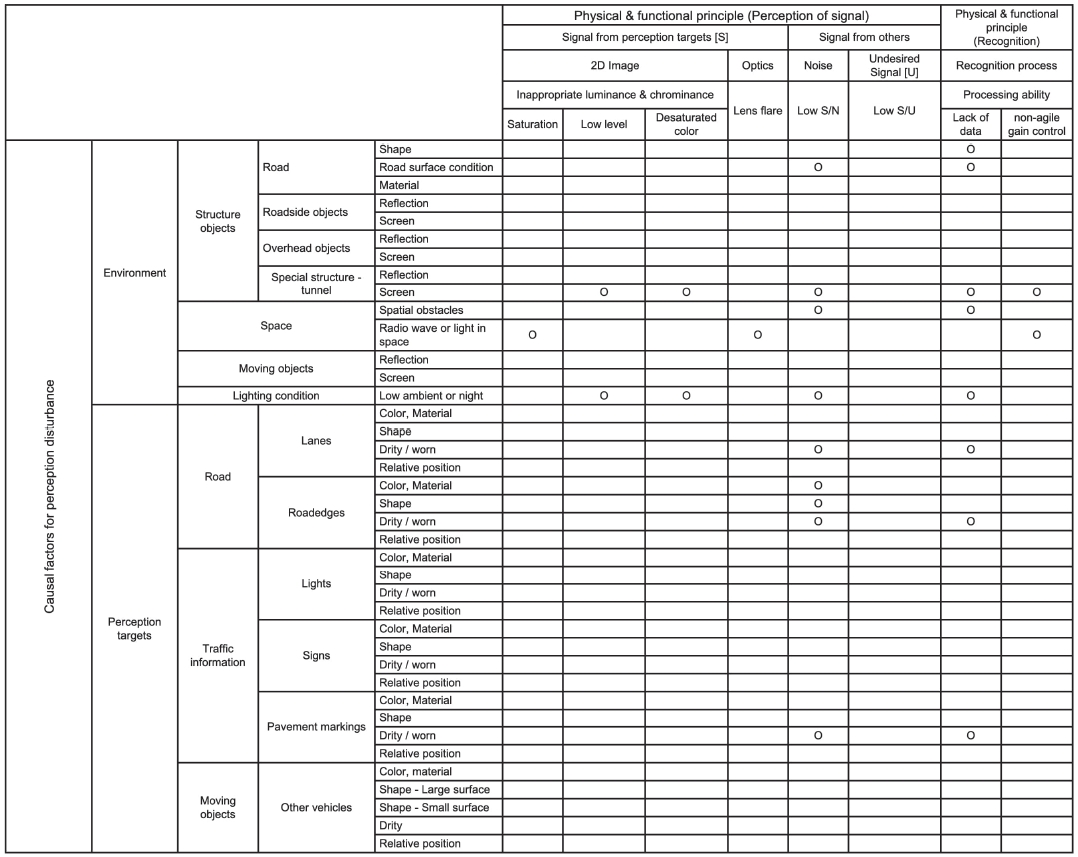
카메라 센서에서 인지성능의 한계를 유발하는 위험 인과 요인과 센서의 물리적, 기능적 특성을 동시에 고려하기 위해 이들을 양 축으로 하는 매트릭스를 활용하며 위험 요인을 행으로 나열하고 센서의 물리적, 기능적 특성을 열로 나열하여 위험 상황을 유발할 수 있는 항목을 교차 확인하였다. 그 결과 Table 1과 같은 카메라 센서에 대한 매트릭스를 도출하였으며, 같은 열에 함께 표시된 위험 요인의 그룹은 이들이 특정 센서의 동일한 물리적, 기능적 특성에 영향을 끼칠 수 있다는 것을 의미하며 복수의 요인들 중에서 인식 성능에 더 심각한 영향을 미치는 것을 채택한다.

A matrix of risk causal factors and the functional and physical characteristics of the camera sensor
이상의 과정을 통해 카메라 센서의 인지 제한을 유발하는 악의 조건에서 카메라 센서와 관련한 위험 인과 요인을 기준으로 센서의 물리적, 기능적 특성 및 인지 제한을 유발하는 악의 조건을 분석하였으며 이를 Table 2에 정리하였다.
Perception limitations due to adverse conditions on the camera sensor
3.4 악의 조건에 기인한 라이다 센서의 인지 성능 저하
라이다 센서와 관련하여 인지 타겟으로부터 획득한 신호에 내재된 인지 제한 또는 방해 요인으로는 Fig. 3과 같이 레이저 펄스가 인지 대상에 투사될 때 발생하는 간접파에 의한 성분과 탐지 범위 내의 시야(Field of view, FOV)에 물체가 존재하지 않아서 반사파가 발생하지 않는 상황이 포함된다. 또한, 대기 중의 입자성 매질 등에 의한 레이저 펄스의 흡수, 산란에 따른 반사파의 강도 저하 그리고 레이저 펄스의 반사율을 떨어뜨리는 물체의 재질에 의한 강도 저하도 고려된다. 그리고 단일 시점이나 순차적 시점에서 관찰되는 반사파 강도 상의 극단적인 대비가 고려된다. 인지 타겟 이외의 것으로부터의 신호 성분에 의한 인지 제한 요인에는 신호 대 잡음비를 떨어뜨리는 잡음과 불필요한 신호 요소가 유입되는 것이 포함된다. 인식 과정의 처리 능력 측면에서 도출해야 할 인지 제한 요인으로 측위 기술이 활용해야 할 데이터가 부족한 상황이 포함된다.

Physical and functional characteristics of the Lidar sensor associated with perception risk factors
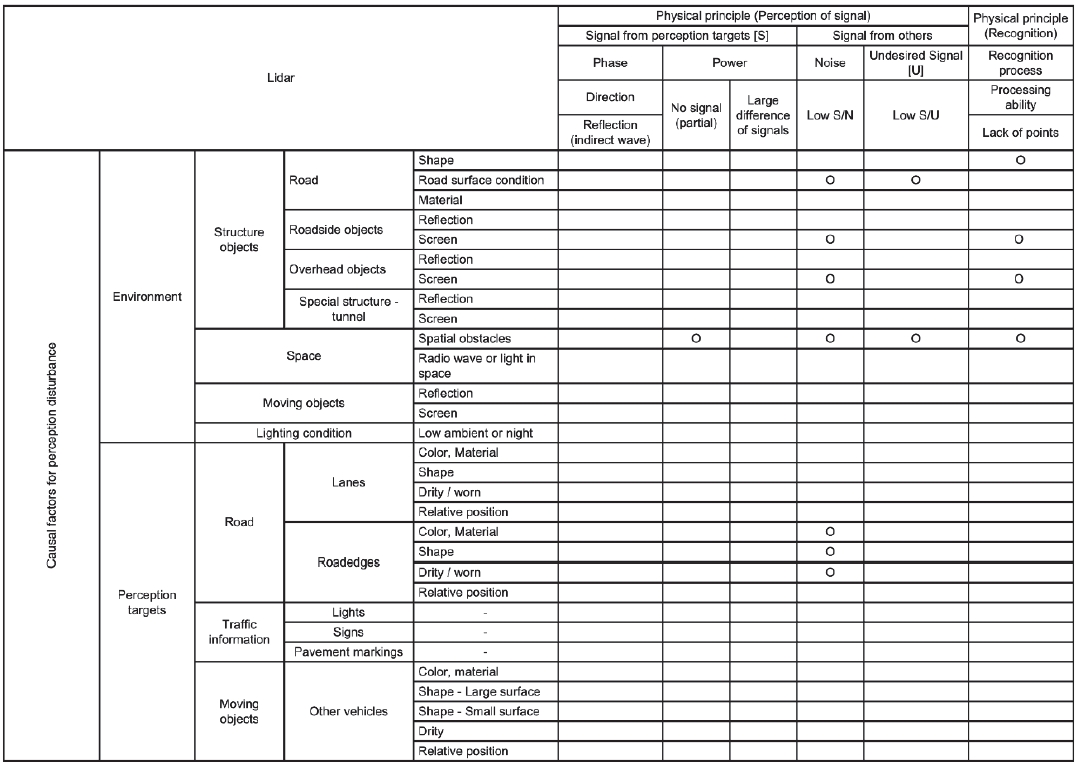
라이다 센서에서 인지 제한을 유발하는 위험 인과 요인과 센서의 물리적, 기능적 특성을 동시에 고려하기 위해 이들을 양 축으로 하는 매트릭스를 활용하며 위험 요인을 행으로 나열하고 센서의 물리적, 기능적 특성을 열로 나열하여 위험 상황을 유발할 수 있는 항목을 교차 확인하였다. Table 3에 라이다 센서에 대한 매트릭스를 보였으며, 같은 열에 함께 표시된 위험 요인의 그룹은 이들이 특정 센서의 동일한 물리적, 기능적 특성에 영향을 끼칠 수 있다는 것을 의미하며 복수의 요인들 중에서 인식 성능에 더 심각한 영향을 미치는 것을 채택한다.
A matrix of risk causal factors and the functional and physical characteristics of the Lidar sensor
이상의 과정을 통해 라이다 센서의 인지 제한을 유발하는 악의 조건에서 라이다 센서와 관련한 위험 인과 요인을 기준으로 센서의 물리적, 기능적 특성 및 인지 제한을 유발하는 악의 조건을 분석하였으며 이를 Table 4에 정리하였다.
Perception limitations due to adverse conditions on the Lidar sensor
3.5 악의 조건에 기인한 레이다 센서의 인지 성능 저하
레이다 센서와 관련하여 인지 타겟으로부터 획득한 신호에 내재된 인지 제한 또는 방해 요인에는 Fig. 4와 같이 레이다 파가 인지 대상에 투사될 때 발생하는 간접파에 의한 성분과 탐지 범위 내에 물체가 존재하지 않아서 반사파가 발생하지 않는 상황이 포함된다. 또한, 전자기파의 반사율을 떨어뜨리는 물체의 표면 상태와 재질로 인해 낮아진 전파의 강도 그리고 단일 시점 또는 순차적 시점에서 관찰되는 반사파 전력의 극단적인 대비가 고려된다. 인지 타겟 이외의 것으로부터의 신호 성분에 의한 인지 제한 요인에는 신호 대 잡음비를 떨어뜨리는 잡음과 불필요한 신호 요소가 유입되는 것이 포함된다. 인식 과정의 처리 능력 측면에서 도출해야 할 인지 제한 요인으로 측위 기술이 활용해야 할 객체 데이터가 부족한 상황이 포함된다.

Physical and functional characteristics of the radar sensor associated with perception risk factors
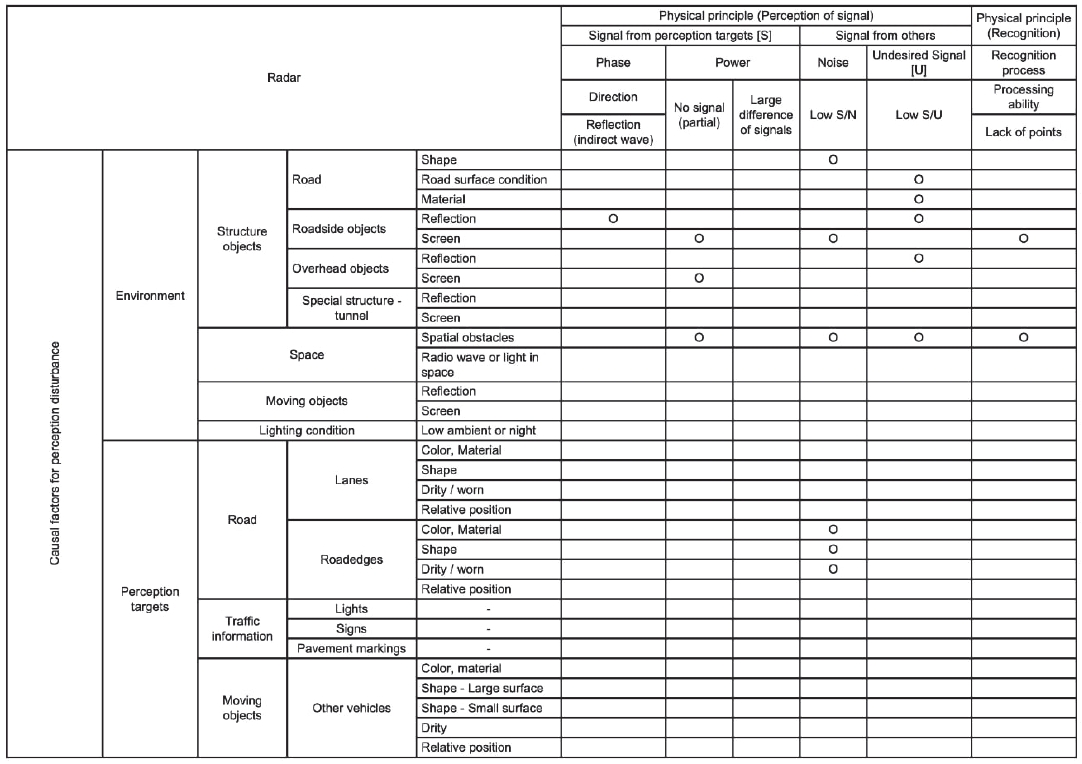
레이다 센서에서 인지 제한을 유발하는 위험 인과 요인과 센서의 물리적, 기능적 특성을 동시에 고려하기 위해 이들을 양 축으로 하는 매트릭스를 활용하며 위험 요인을 행으로 나열하고 센서의 물리적, 기능적 특성을 열로 나열하여 위험 상황을 유발할 수 있는 항목을 교차 확인하였다. Table 5에 레이다 센서에 대한 매트릭스를 보였으며, 같은 열에 함께 표시된 위험 요인의 그룹은 이들이 특정 센서의 동일한 물리적, 기능적 특성에 영향을 끼칠 수 있다는 것을 의미하며 복수의 요인들 중에서 인식 성능에 더 심각한 영향을 미치는 것을 채택한다.
A matrix of risk causal factors and the functional and physical characteristics of the radar sensor
이상의 과정을 통해 레이다 센서의 인지 제한을 유발하는 악의 조건에서 레이다 센서와 관련한 위험 인과 요인을 기준으로 센서의 물리적, 기능적 특성 및 인지 제한을 유발하는 악의 조건을 분석하였으며 이를 Table 6에 정리하였다.
Perception limitations due to adverse conditions on the radar sensor
3.6 기타 센서의 악의 조건에 따른 성능 저하
GNSS(Global Navigation Satellite System) 센서의 관점에서 살펴보면 위성과의 연결이 끊기는 상황이나 충분한 수의 위성과 연결되지 못하여 정확한 측위를 할 수 없는 상황에서 명확한 인지 제한이 발생하므로 차량이 GNSS 신호를 수신하는 데에 제한을 가하는 환경적인 요인과 이에 의한 신호 소실을 센서의 물리적, 기능적 특성으로 간주한다.
4. 악의 조건 측위 성능 평가 시나리오
카메라 센서가 주변 환경을 인지하는 데에 제약을 가할 수 있는 것으로 안개, 강우, 적설과 같은 기상 환경 상의 악의 조건을 고려할 수 있다. 안개와 강우에 의한 대기 중의 입자상 물질은 카메라 센서가 인지해야 할 주변 사물을 부분적으로 가림으로써 영상의 밝기, 대비, 선예도 특성에 모두 악 영향을 끼치게 되며 극단적인 경우에는 인지 대상의 형체 전부를 가리게 된다. 이는 카메라 센서에서 생성된 영상을 활용하여 물체를 검출하는 딥러닝 기반의 객체 검출기의 검출 신뢰도 하락으로 이어진다. 안개와 강우는 라이다 센서의 관점에서도 악의 조건으로 작용하는데, 대기 중의 입자상 물질 즉, 수분 입자는 레이저 펄스를 흡수할 뿐만 아니라 이를 산란시키는 역할을 하게 된다. 이로 인해 투사된 레이저 펄스 중에서 인지 목표물에 이르는 유효한 성분이 줄어들며 잡음의 비율이 증가하게 되어 라이다 센서가 출력하는 포인트 데이터 내에 유의한 성분의 손실이 발생하고 신호 대 잡음비가 떨어지는 결과를 초래하게 된다.16) 안개나 강우 상황에서 레이다 센서가 다른 센서보다 악의 조건의 영향을 적게 받지만 폭우 상황에서는 레이다 센서의 출력 데이터에 손실이 발생할 수 있다.17) 노면에 고인 우수와 눈은 카메라 센서가 차선, 노면 표시 등과 같은 노면 상의 정보를 인지할 수 없게 만든다. 뿐만 아니라, 도로 노면, 도로 가장자리가 쓰레기나 이물질로 덮여 있는 상황은 카메라 센서나 라이다 센서로 하여금 측위에 필요한 주요 노면 정보를 획득할 수 없게 한다. 차량이 터널 내부를 주행하고 있을 때에는 카메라 센서로부터 저휘도, 저색도의 영상이 생성되며 이러한 영상에서는 신호 대 잡음비가 떨어지므로 정밀한 객체 인식에 악영향이 발생한다. 또한, 차량이 터널에 진입하는 직후나 터널에서 진출하는 직후에는 극단적인 광량차로 인해 블랙아웃과 화이트아웃 현상이 발생하는데, 이 순간에는 영상 내에 유의미한 정보가 전무한 상태가 되므로 측위에 활용이 불가능하다. 야간 주행 시에 교행 차량의 전조등 불빛이 카메라 센서에 유입될 때에도 영상이 포화되는 현상이 발생하므로 유의미한 정보를 획득하는 데에 제약이 발생한다.
도로 주변이나 상부의 구조물은 그 자체로서 인지의 대상이 되기도 하지만 방음벽이나 교각 등이 도로를 에워싸는 환경에서는 라이다나 레이다 센서가 측위에 필요한 도로 주변의 주요 지형 지물을 인지하는 데에 제한을 가하는 요인이 될 수 있다. 즉, 레이저 펄스나 레이다 파가 주변 구조물에 가로막혀 인지 대상에 다다르지 못하는 상황이 발생하여 유효한 데이터가 부족한 상황이 초래될 수 있다. 특히, 레이다 정보는 객체의 높이 정보를 포함하지 않기 때문에 상부 구조물에서 반송되는 불필요한 정보로 인해 오인식이 발생할 수 있다.
4.1 시나리오 기반 측위 성능 평가를 위한 환경
측위 성능에 대한 평가는 사고 예방을 위해 주변 상황에 대한 통제가 가능하고 특정한 기상 상황을 모사할 수 있는 설비가 갖추어진 테스트 전용 환경이나 실제 도로 상에서 이루어질 수 있다. 3장에서 살펴본 바와 같이 자율주행시스템이 측위를 위해 주변 환경을 인지하는 것에 제약을 가하는 위험 인과 요인은 환경적 요소와 인지 대상체 자체로 분류될 수 있다. 위험 인과 요인의 세부 항목 중 일부는 자연적 또는 인공적 구조물의 영향에 의한 것이며 일부는 기상 상황과 같은 통제가 불가능한 것에 기인한 것이다. 특정한 구조물에 의한 위험 인과 요인으로부터 도출한 시나리오의 일부는 유사한 환경을 지닌 도로 환경에서의 평가에서 활용될 수 있으나 이를 제외한 제어 불가능한 위험 인과 요인에 의한 시나리오는 소프트웨어 시뮬레이션과 같은 가상 환경 또는 테스트 전용 환경에서 활용될 수 있다. 본 연구에서 구축하고자 하는 측위 성능 평가 시나리오는 실제 도로 상에서 이루어지는 평가에서 활용되는 경우를 포함하고 있으나 폭우, 농무와 같은 제어 불가능한 기상 상황을 담고 있는 시나리오는 소프트웨어 시뮬레이션 또는 테스트 전용 환경에서 이루어지는 평가에서 활용될 수 있음을 가정하고 있다. 또한, 현실 세계에서 빈번하게 재현할 수 없는 상황을 포함하고 있는 시나리오는 센서 데이터의 직접적인 가공을 통한 가상의 악의 조건 생성에 의해 구현될 수 있다. 본 연구에서 구축하고자 하는 시나리오에서 활용하는 차로는 균일한 재질로 포장되어 있고 횡방향 기울기는 0도이며 평가 구간 전체에 걸쳐 유지되는 것으로 가정한다. 주행 차로 영역의 전방과 양쪽의 일반적인 시야는 평범한 인공 또는 자연 환경으로 구성된다. 평가에는 의도되지 않은 기동을 하는 하나 이상의 차량이 포함될 수 있으나 테스트 차량과의 충돌 상황은 발생하지 않는다.
측위 성능 평가는 다수의 센서를 차량에 설치한 후 이루어지며 센서의 종류와 수량 및 구성은 평가 대상 측위시스템에 의존적이다. 센서의 사양과 설치 위치는 실제 테스트 케이스에서 구체화되지만 본 연구에서 구축하고자 하는 시나리오에서는 Table 7에서 보이는 바와 같은 7종의 센서 13개를 Fig. 5에서 보이는 바와 같은 위치에 탑재한 테스트 차량의 예를 대상으로 하고 있다. 시나리오에서 표현하고자 하는 악의 조건에 의한 센서의 인지 제한 상황은 센서의 종류를 특정하고 있고 구체적인 테스트 케이스에서 센서의 사양이 지정되므로 센서의 수량과 설치 위치는 시나리오의 구성과 무관하다.
Specification of the sensors used in the scenario

Installation locations of sensors used in the scenario
4.2 단일 악의 조건에 대한 측위 성능 평가 시나리오
Table 1, Table 3, Table 5에서 살펴본 바와 같이, 특정 악의 조건 상황의 단일 인과 요인이 센서의 복수의 물리적, 기능적 특성에 영향을 주는 경우를 발견할 수 있다. 또한, 단일 악의 조건이 하나 이상의 센서에 대해 인지 제약 상황을 야기하는 경우가 있으므로 하나의 시나리오를 통해 여러 센서를 대상으로 한 악조건 상황에서 측위 기술의 대응 능력을 확인할 수 있다. 구체적으로, 각 매트릭스에서 임의의 단일 인과 요인과 관련된 물리적, 기능적 특성이 많은 순서 즉, 센서의 물리적, 기능적 특성에 대한 영향이 크게 나타나는 순서로 인과 요인을 나열해 보면 각 센서에 가장 우세하게 영향을 끼치는 악의 조건을 파악할 수 있을 뿐만 아니라 여러 센서에서 공통적으로 우세한 영향을 끼치는 악의 조건을 도출할 수 있게 된다. 예를 들어, 카메라 센서에 가장 큰 영향을 끼치는 요소는 야간, 터널, 지하차도 내부에서의 열악한 조명 조건임을 알 수 있으며 이어서 안개, 강우와 같은 대기 중의 입자상 물질의 존재도 센서의 특성에 악 영향을 준다는 것을 알 수 있다. 또한, 레이다와 라이더 센서에 있어서 대기 중의 입자상 물질이 각 센서의 특성에 가장 우세한 영향을 끼치는 인과 요인이 됨을 확인할 수 있다. 그러므로 카메라, 라이다, 레이다 센서에 모두에 대해 인지 제약 상황을 유발하는 단일 인과 요인으로서 대기 중의 입자상 물질을 선택할 수 있으며 이를 포함하는 위험 시나리오를 구축할 수 있다. 대기 중의 입자상 물질에는 강우와 안개에 의한 수분 입자뿐만 아니라 연기, 먼지 입자 등이 포함되며 본 연구에서는 기상 상황과 관련한 악의 조건에 주안점을 두고 있으므로 강우와 안개를 우선적으로 고려한다. 강우와 안개 중에서 카메라와 라이다 센서의 인지 기능에 가장 큰 제약을 유발하는 것은 안개이며 레이다 센서에서는 폭우 다음으로 안개가 우세한 영향을 끼친다.17) 그러므로 본 연구에서는 짙은 안개가 발생한 기후 상황에서의 측위 성능을 평가하기 위한 시나리오를 제시하였으며, 이를 통해 하나의 악의 조건으로 여러 센서에서 인지 성능 저하가 발생하는 상황을 구성하였다.
짙은 안개가 낀 도로를 주행하는 차량의 측위 성능을 평가하기 위한 시나리오이다. 앞서 설명한 바와 같이 안개가 낀 상황은 카메라 센서와 라이다 센서의 성능에 심각한 영향을 끼치게 되므로 본 시나리오를 통해 카메라와 라이다 센서에서 인지 제한이 발생한 악의 조건에서의 측위 성능을 평가하고자 한다. 카메라, 라이다 센서를 제외한 GNSS 및 레이다 센서는 정상동작이 보장되며 차량이 정밀도로지도를 보유한 상황을 가정한다. 측위 시스템은 주행 중 현재 위치의 좌표를 산출하며 이는 GNSS 센서를 통해 확보한 기준 좌표와 비교된다.
총 평가 노선의 길이는 1,500미터로 Fig. 6에서 보이는 바와 같이 차량이 주행을 시작하여 안개가 끼지 않은 500미터 구간을 주행한 후에 짙은 안개가 낀 500미터 구간을 주행하게 된다. 이후 안개가 끼지 않은 500미터를 주행하고 나서 평가가 완료된다.

Drive lane configuration for evaluation scenario with one adverse condition
강우 또는 강설이 발생하지 않으며 평가 노선 중 안개 발생 구간에서 가시거리 500미터 이하의 짙은 안개가 발생한 상황에서 평가가 이루어진다. 센서의 인지 성능 저하를 유발하는 악의 조건 중에서 안개와 같은 기상 상황을 실제 도로나 테스트 환경에서 반복 재현하는 것이 어렵기 때문에 시나리오 상에서 기상 상황을 모사할 필요가 있다. 이는 특정 센서로부터 출력된 데이터를 가로채어 왜곡시킨 후에 측위 시스템에 전달함으로써 마치 악의 조건 환경에 의해 센서의 인지 기능에 장애가 발생한 것처럼 만드는 방법이다. 안개가 낀 상황에서의 카메라 센서 출력을 모사하기 위하여 카메라에서 출력되는 영상을 기반으로 밝기와 대비를 높이고 선예도를 떨어뜨린 후 영상의 평균 밝기보다 높은 영역에서 정규분포를 가지는 값을 무작위로 선택하여 영상 내의 임의의 픽셀 값에 더하는 과정을 거쳐 새로운 영상을 생성한다. 안개가 낀 기상 상황에서의 라이다 센서 출력을 모사하기 위하여 센서에서 출력되는 포인트 데이터 내에서 라이다 신호의 강도(Intensity)를 전반적으로 낮추고, 임의의 위치의 포인트 데이터를 누락시키는 동시에 탐지 거리가 먼 포인트일수록 많이 누락되는 경향성을 부여한다. 이상과 같이 두 가지 센서의 출력에 의도된 왜곡을 가한 후에 측위 시스템에 입력함으로써 안개가 낀 기상 상황에 대한 모사가 가능하다.
테스트 차량은 정해진 경로를 따라 주행하며 경로는 사전에 정의된다. 차량의 주행 속도는 제한 최고 속도 범위 내에서 설정하며 반복적인 평가에서 단계별로 주행 속도를 가변 시키며 측위 성능을 평가한다. 테스트 차량의 기동은 다음 순서로 이루어진다.
- 1) 테스트의 시작 직후, 100미터 구간 동안 0.0 m/s에서 주행 목표 속도가 되도록 가속한다.
- 2) 가속이 완료되면 미리 지정된 차로를 따라 주행한다.
- 3) 종료 지점 100미터 이전 지점에서부터 감속을 시작하여 종료 지점에서 정지한다.
테스트 차량이 주행하는 동안 환경적 요인에 기인한 악의 조건을 카메라, 라이다 센서에 부여하며 이는 주행 거리에 따라 자동으로 트리거가 이루어지도록 한다.
- 1) 테스트 시작 직후, 카메라, 라이다 센서를 포함한 모든 센서가 정상적으로 동작된다.
- 2) 테스트 차량의 주행 시작 후 500미터 지점(안개 발행 지역)부터 카메라 센서와 라이다 센서의 출력 데이터를 가로채어 안개에 의한 인지 제한 상황을 모사한 후에 측위 시스템에 입력한다.
- 3) 테스트 차량은 안개가 낀 구간인 500미터를 주행하며, 차량이 1,000미터 지점에 도달하는 것과 동시에 카메라 센서와 라이다 센서에서 출력된 가공되지 않은 센서 데이터를 측위 시스템에 입력한다.
- 4) 모든 센서가 정상적으로 동작하는 상태에서 500미터를 주행한 후 테스트를 종료한다.
평가가 수행되는 전 과정에서 테스트 차량에 설치된 13개의 센서가 주변상황을 인지하며 이의 결과로 생성된 데이터는 지정된 주기에 따라 발행(Publish) 된다. 측위 시스템은 발행된 센서 데이터를 활용하여 현재 주행 차량의 위치를 계산하여 제시한다. 측위 시스템에서 산출한 좌표는 기준이 되는 GNSS 센서의 출력 좌표와 비교되어 성능 평가가 이루어진다.
4.3 연속된 악의 조건에 대한 측위 성능 평가 시나리오
실제 주행 상황에서는 센서의 인지 제한을 유발하는 악의 조건이 연속하여 발생하는 경우가 있으며 이러한 조건에서 측위 성능을 평가할 필요가 있다. 예를 들어, 차량이 터널에서 진출한 직후에 짙은 안개가 낀 기후 상황을 맞이하거나 GNSS 음영 지역인 고가차로 하부를 주행하던 차량이 이를 벗어나 폭우가 쏟아지는 도로로 주행하는 경우 등이 일상적으로 접할 수 있는 연속적인 악의 조건이다. 연속된 악의 조건은 다수의 센서에 인지 제한을 유발하게 되므로 이를 반영한 평가 시나리오의 수립이 요구된다. GNSS 센서는 정밀 측위를 위한 필수적인 도구이므로 GNSS 신호의 부분적 또는 전체 소실을 포함하는 악의 조건이 시나리오에 포함되어야 하며, 이와 연속되는 악의 조건으로 4.3절에서 언급한 바와 같이 카메라, 라이다, 레이다 센서에 모두에 대해 우세하게 인지 제약 상황을 유발하는 인과 요인인 대기 중의 입자상 물질에 의한 것을 선택할 수 있다. 대기 중의 입자상 물질을 발생시키는 폭우 상황은 레이다 센서의 인지 기능에 가장 큰 영향을 끼치며 카메라와 라이다 센서에서 안개 다음으로 우세한 영향을 끼친다.17) 그러므로 본 연구에서는 GNSS 센서의 인지 제약을 유발하는 GNSS 음영지역에서의 주행 상황과 이와 연속되어 폭우가 발생한 기후 상황에서의 측위 성능을 평가하기 위한 시나리오를 제시하였으며, 이를 통해 GNSS 센서의 인지 제약 상황과 복수 센서에서의 인지 제약 상황을 연속으로 구성하였다.
본 시나리오는 차량이 상판과 하판으로 구성된 복층 구조 교량의 하판 상의 도로를 주행하는 경우에 GNSS 신호의 수신이 원활하지 않아 정확한 위치를 산출할 수 없는 상황과 교량에서 빠져나온 후에 강우로 인해 카메라, 라이다, 레이다 센서가 주변 환경 정보를 획득하는 데에 제한이 발생하는 상황에서 측위 성능을 평가하는 시나리오를 활용할 수 있다. 차량의 상부가 교량의 상판 구조물에 의해 막혀 있는 환경에서 주행 중일 때에는 GNSS 신호를 전부 또는 일부 소실하게 되며 상부가 개방된 곳으로 진출한 직후에도 GNSS 신호를 정상적으로 수신하는데 시간이 소요된다. 또한, 대기 중의 빗방울과 차량 전면 유리창에 맺힌 빗방울 및 노면에 고인 우수는 카메라 센서로 하여금 인지 대상을 파악하는 데에 제약을 가한다. 뿐만 아니라, 대기 중의 수분은 레이저 펄스와 레이다 파를 흡수, 산란하게 되어 이들 센서가 출력하는 데이터에서 유의한 성분의 손실을 발생시키고 신호 대 잡음비가 떨어뜨리는 결과를 초래한다. 측위 시스템은 주행 중 위치 좌표를 산출하며 이는 절대 위치 좌표와 비교되어 정확도가 산정된다.
총 평가 노선의 길이는 2,000미터로 Fig. 7에서 보이는 바와 같이 차량이 주행을 시작하여 강우가 발생하지 않고 GNSS 신호의 수신이 원활한 500미터 구간을 주행한 후에 GNSS 음영지역으로 진입한다. GNSS 음영지역에서 500미터를 주행한 후에 이를 벗어나게 되며 이와 동시에 강우 발생 구간에 진입하여 500미터를 주행하게 된다. 이후 강우가 발생하지 않는 500미터를 주행하고 나서 평가가 완료된다.

Drive lane configuration for evaluation scenario with successive adverse conditions
평가 노선 중 강우 발생 구간에서 강우가 환경이 조성되며 폭우에 해당하는 7.6 mm/h의 강우량과 호우에 해당하는 30 mm/h의 두 가지 상황에서 평가가 이루어진다. 센서의 인지 제한을 유발하는 강우 상황은 테스트 환경에서 재현하는 것이 가능하며 이는 특정 구간에서 대기 중에 물을 분사하고 노면에 일정 수준의 고임이 발생하도록 하는 제어로 구현할 수 있으므로 본 시나리오에서는 이러한 테스트 환경 하에서 측위 성능을 평가하는 것을 가정한다.
테스트 차량은 정해진 경로를 따라 주행하며 경로는 사전에 정의된다. 차량의 주행 속도는 제한 최고 속도 범위 내에서 설정하며 반복적인 평가에서 단계별로 주행 속도를 가변 시키며 측위 성능을 평가한다. 테스트 차량의 기동은 다음 순서로 이루어진다.
- 1) 테스트의 시작 직후, 100미터 구간 동안 0.0 m/s에서 주행 목표 속도가 되도록 가속한다.
- 2) 가속이 완료되면 미리 지정된 차로를 따라 주행한다.
- 3) 종료 지점 100미터 이전 지점에서부터 감속을 시작하여 종료 지점에서 정지한다.
테스트 차량이 주행하는 동안 환경적 요인에 기인한 악의 조건을 GNSS 센서에 부여하며 이는 주행 거리에 트리거되어 이루어진다.
- 1) 테스트 시작 직후, GNSS, 카메라, 라이다, 레이다 센서를 포함한 모든 센서가 정상적으로 동작된다.
- 2) 테스트 차량의 주행 시작 후 500미터 지점(터널 진입 지점)에서 GNSS 센서의 동작을 중지시켜 위치 정보의 수신에 제한을 가한다. 테스트 차량은 GNSS 신호의 수신 없이 500미터를 주행한다.
- 3) 차량이 1,000미터 지점에 도달하는 것과 동시에 강우 상황을 발생시킨다.
- 4) 차량이 1,000미터 지점 통과 후 GNSS 수신 지연 구간 끝에 도달하는 것과 동시에 GNSS 센서를 동작 시켜 위치 정보를 수신하도록 한다.
- 5) 차량은 강우 발생 구간인 500미터를 주행하며, 차량이 1,500미터 지점에 도달하는 것과 동시에 강우 상황을 종료한다.
- 6) 모든 센서가 정상적으로 동작하는 상태에서 500미터를 주행한 후 테스트를 종료한다.
GNSS 음영지역에서 진출 후 수신을 회복하기까지 걸리는 지연 시간을 2초로 가정하면 GNSS 수진 지연 구간의 길이는 다음 식 (1)로 나타낼 수 있다.
| (1) |
평가가 수행되는 전 과정에서 테스트 차량에 설치된 13개의 센서가 주변상황을 인지하며 이의 결과로 생성된 데이터는 지정된 주기에 따라 발행된다. 측위 시스템은 발행된 센서 데이터를 활용하여 현재 주행 차량의 위치를 계산하여 제시한다. 측위 시스템에서 산출한 좌표는 기준이 되는 GNSS 센서의 출력 좌표와 비교되어 성능 평가가 이루어진다.
4.4 측위 성능 평가 지표
측위 성능을 평가하기 위한 지표로서 종방향 및 횡방향의 위치 정확도를 활용하는데 이는 기준 위치와 측위시스템이 추정한 위치 간의 오차의 평균으로 정의된다. 실제 도로 환경에서의 평가에서는 GNSS 수신 정보를 기준 위치로 활용하며 GNSS 음영지역이 포함된 경우에는 고정밀 지도 상의 경로 좌표를 기준 위치로 활용한다. 소프트웨어 시뮬레이션 환경에서의 평가에서는 가상 환경 구축에 사용된 고정밀 지도 상의 특정 객체를 기준으로 상대 경로 좌표를 측정한 후 GNSS 단위의 기준 위치로 변환하여 활용한다. 위치 정확도는 시나리오에 의한 평가가 이루어지는 동안에 실시간으로 획득되는 GNSS 좌표 및 고정밀 지도 상의 경로 좌표와 측위 시스템이 산출한 추정 좌표 간의 오차의 평균으로 계산된다. 이를 식 (2), (3)에 나타내었다.
| (2) |
| (3) |
5. 토의 및 결론
자율주행시스템을 위한 측위 기술이 직면할 수 있는 위험 요소의 수가 무한한 것으로 간주할 수 있으므로 현실적으로 각 요소에 대한 측위 기술의 평가를 모두 수행하는 것이 불가능하다. 그러므로 위험 요소를 유형별로 분류하고 각 유형이 센서에서 유발할 수 있는 영향을 검토하여 평가 범위를 줄이는 과정이 요구되며 이는 논리적으로 구조화된 시나리오를 구성하는 것으로 가능해진다. 본 연구에서는 주행 악조건 상황에서 정밀 측위 성능의 평가를 위한 다양한 센서 관련 위험 시나리오를 구축하는 방법론을 제시하였다. 이를 위해 각 센서에 인지 제한을 발생시키는 위험 인과 요인을 환경적인 요소와 인식 대상의 두 범주로 나누고, 이들을 구성하는 세부 요인들이 센서의 물리적, 기능적 특성에 끼치는 영향을 가시화하기 위해 매트릭스를 활용하였다. 그리고, 매트릭스를 통해 상호 영향을 끼치는 항목을 발굴하고 센서의 물리적, 기능적 특성의 관점에서 인지 제한을 유발하는 구체적인 상황을 확인하였다. 분석 과정에서 임의의 단일 위험 인과 요인이 센서 내의 복수의 물리적, 기능적 특성에 영향을 주는 경우와 단일 악의 조건이 다수의 인과 요인으로 분류되어 센서 내의 복수의 특성에 영향을 주는 경우를 파악할 수 있었다. 또한, 단일 악의 조건이 하나 이상의 센서에 대해 인지 제한 상황을 야기하는 경우가 있으므로 단일 시나리오를 통해 여러 센서의 다양한 물리적, 기능적 특성에 영향을 끼치는 악의 조건에서 측위 성능을 평가할 수 있음을 확인할 수 있었다. 또한, 시나리오를 도출하는 과정에서 현실적으로 제어 불가능한 기상 환경과 같은 요인에 의한 악의 조건을 고려한 시나리오는 소프트웨어 기반 시뮬레이션 환경이나 테스트 전용 환경에서의 평가를 통해 구현될 수 있으며 현실 환경에서 빈번하게 재현할 수 없는 악의 조건은 센서 데이터의 직접적인 가공을 통해 모사되어야 함을 확인하였다.
본 연구에서 제안한 시나리오의 예에서 현실에서 발생 가능한 악의 조건이 다종의 센서에 유발할 수 있는 다수의 인지 제한 상황을 포함하였으며 평가 대상인 측위시스템에 악의 조건을 인가하는 명시적인 절차를 제시하였다. 이를 통해, 센서 별 인지 제한 상황으로부터 도출된 시나리오를 조합하여 통합적인 시나리오를 구축함으로써 현실성이 높으며 자원 효율적인 측위 성능 평가가 가능함을 확인하였다.
6. 결 론
본 논문에서는 악의 조건 상황에서 자율주행시스템의 측위 성능을 평가할 수 있는 시나리오를 구축하는 것에 주안점을 두었으므로 실제 도로나 시뮬레이션 환경에서 기 구축된 시나리오를 활용해 측위 성능을 평가하는 과정이 다루어지지 않았다. 이어지는 연구에서는 시뮬레이션 상에서 본 연구에서 제시된 시나리오를 기반으로 측위 성능을 평가할 계획이며 이를 통해 시나리오를 검증, 개선한 후에 실제 도로 환경에서 시나리오에 의한 평가를 진행하여 시나리오의 유효성을 입증할 예정이다. 이러한 추가적인 연구를 통해 시나리오의 구체성과 현실성이 높아질 수 있을 것으로 기대된다. 또한, 악의 조건의 세부적인 분류를 통해 현실 세계에서 재현하기에 용이한 것과 특수한 환경이나 소프트웨어 시뮬레이션 상에서 재현할 수 있는 것 그리고 센서 데이터의 처리를 통해 구현할 수 있는 것으로 구분하고 이를 바탕으로 악의 조건을 모사하기 위해 필요한 물리적 환경과 센서 데이터를 가공하는 방법을 명세화 할 계획이다. 특히, 악의 조건에서 센서의 인지 제한을 인위적으로 모사하기 위해 카메라, 라이다, 레이다 센서의 물리적, 기능적 특성에 부합하며 정량적인 제어를 가능하게 하는 센서 데이터의 가공 방법에 대한 추가적인 연구를 진행할 계획이다. 이를 통해 악의 조건에서의 측위 성능 평가를 위한 시나리오의 완성도를 높일 수 있을 뿐만 아니라 시나리오 기반 평가를 위한 논리적이고 체계적인 환경을 구축할 수 있을 것이다.
Acknowledgments
본 연구는 산업통산자원부 한국산업기술기획평가원의 자율주행기술개발혁신사업(과제명 : 악의 조건 주행 환경에서 연속 대응 가능한 Hyper 자차 위치 인식 기술 개발, 과제번호 : 20018198)의 연구비 지원에 의해 수행되었습니다.
References
- UNECE, Transport-Vehicle Regulations, Automatically Commanded Steering Function(ACSF), https://wiki.unece.org/display/trans/ACSF+23rd+session, , 2023.
- J. Son and M. Park, “Driving Behavior Analysis to Verify the Criteria of a Driver Monitoring System in a Conditional Autonomous Vehicle - Part I,” Journal of Auto-Vehicle Safety Association, Vol. 13, No.1, pp.38-44, 2021.
- MOLIT, Regulation for Performance and Safety Standards of Motor Vehicle and Vehicle Parts – Attached Table 27, https://www.law.go.kr, , 2020.
- Y. Kook and K. Yi, “Toward Real-World Adoption of Autonomous Driving Vehicle on Public Roadways: Human-Centered Performance Evaluation with Safety Critical Scenarios,” Journal of Auto-Vehicle Safety Association, Vol.15, No.2, pp.6-12, 2023.
- X. Zhang, Y. K. Mo, E. Chodowiec, Y. Tang, M. Higgins, S. Khastgir and P. Jennings, “A Novel Scenario-Based Testing Approach for Cooperative-Automated Driving Systems,” IEEE SMC(Systems, Man, and Cybernetics), 2023.
-
H. Kim, G. Jo and J. Son, “Implementation and Verification of Virtual Environment for Autonomous Driving System Development,” Transactions of KSAE, Vol.29, No.4, pp.331-336, 2021.
[https://doi.org/10.7467/KSAE.2021.29.4.331]

-
D. Nalic, T. Mihalj, M. Bäumler, M. Lehmann, A. Eichberger and S. Bernsteiner, “Scenario based Testing of Automated Driving Systems: A Literature Survey,” Proceeding of the FISITA Web Congress, Vol.10, 2020.
[https://doi.org/10.46720/f2020-acm-096]
-
M. Park and J. Son, “Reference Test Scenarios for Assessing the Safety of Take-over in a Conditionally Autonomous Vehicle,” Transactions of KSAE, Vol.27, No.4, pp.309-317, 2019.
[https://doi.org/10.7467/KSAE.2019.27.4.309]
-
C. Medrano-Berumen and M. I. Akbaş, “Abstract Simulation Scenario Generation for Autonomous Vehicle Verification,” Proceeding of the IEEE SoutheastCon, pp.1-6, 2019.
[https://doi.org/10.1109/SoutheastCon42311.2019.9020575]
-
L. Chai, B. Cai, W. ShangGuan, J. Wang and H. Wang, “Basic Simulation Environment for Highly Customized Connected and Autonomous Vehicle Kinematic Scenarios,” Sensors, Vol.17, No.9, Paper No.1938, 2017.
[https://doi.org/10.3390/s17091938]
- SAE, Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-road Motor Vehicles, Standard No.J3016, 2018.
- ISO, 2022, Road Vehicles—Test Scenarios for Automated Driving Systems—Scenario Based Safety Evaluation Framework, https://www.iso.org/standard/78951.html, , 2023.
-
X. Zhang, J. Tao, K. Tan, M. Torngren, J. M. G. Sanchez, M. R. Ramli, X. Tao, M. Gyllenhammar, F. Wotawa, N. Mohan, M. Nica and H. Felbinger, “Finding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review,” IEEE Transactions on Software Engineering, Vol.49, No.3, pp.991-1026, 2023.
[https://doi.org/10.1109/TSE.2022.3170122]
- H. Cheng, Autonomous Intelligent Vehicles: Theory, Algorithms, and Implementation, Springer Science & Business Media, 2011.
-
J. V. Brummelen, M. O’Brien, D. Gruyer and H. Najjaran, “Autonomous Vehicle Perception: The Technology of Today and Tomorrow,” Transportation Research Part C, Vol.89, pp.384-406, 2018.
[https://doi.org/10.1016/j.trc.2018.02.012]
-
J. Kim and B. Park, “A Study of LiDAR’s Detection Performance Degradation in Fog and Rain Climate,” Journal of the Korea Institute of Intelligent Transportation Systems, Vol.21, No.2, pp.101-105, 2022.
[https://doi.org/10.12815/kits.2022.21.2.101]
-
F. Sezgin, D. Vriesman, D. Steinhauser, R. Lugner and T. Brandmeier, “Safe Autonomous Driving in Adverse Weather: Sensor Evaluation and Performance Monitoring,” Proceeding of the 2023 IEEE Intelligent Vehicles Symposium(IV), 2023.
[https://doi.org/10.1109/IV55152.2023.10186596]