V2I 통신 기반 에코 드라이빙을 이용한 커넥티드 하이브리드 자동차 연비 향상에 관한 연구
Copyright Ⓒ 2023 KSAE / 217-07
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
In this paper, the improvement in the fuel economy of a connected hybrid electric vehicle(CHEV) that uses eco-driving with V2I communication is investigated through simulation. The simulation environment uses an integrated driving hardware-in-the-loop(IDHIL) simulator that was built in a previous study. Vehicle-to-everything(V2X) communication devices are used to preview information from traffic lights, and is then used to induce eco-driving behavior in the driver. The normal HEV and CHEV use the same HCU. The HCU consists of a mode decision algorithm and a power distribution algorithm. The scenario reflects the virtual road environment and traffic lights through field measurements. The NHEV and CHEV are simulated three times each, and the vehicle speed, SOC, and fuel consumption results are presented. The simulation results are also compared in terms of speed and engine operating point. In this paper, we found that fuel consumption can improve by 14.32 % if V2I communication-based eco-driving is used.
Keywords:
Connected hybrid electric vehicle, Eco-driving, V2I communication, Fuel economy, Hardware-in-the-loop simulation(HILS)키워드:
커넥티드 하이브리드 자동차, 에코드라이빙, V2I 통신, 연비, 하드웨어 포함 시뮬레이션1. 서 론
전세계적인 환경 문제로 인해 자동차 산업에 대한 규제는 꾸준히 강화되고 있다. 미국 Corporate Average Fuel Economy(CAFE) 표준은 2020년부터 2025년까지 연평균 약 5 %의 연비 개선과 차량 평균 연비 46.7 mpg를 달성하는 것이 목표이다. EU에서는 Regulation(EU) 2019/631를 채택하여 CO2배출량을 2025년에는 15 %, 2030년에는 37.5 % 감축할 것을 목표로 명시했다.1)
최근 Connected and Automated Vehicle(CAV) 산업의 주목으로 인해 Intelligent Transport System(ITS) 기술이 발전하고 있다.2,3) 따라서 Vehicle to everything(V2X) 통신을 사용하는 Connected HEV의 에너지 관리 시스템의 성능을 향상시킬 수 있는 가능성이 확대되고 있다.4) 차량 정보만을 이용한 기존 하이브리드 동력분배 제어의 한계를 극복하기 위해 도로 정보, 교통 정보 등 차량 외부의 정보를 활용한다.5-7)
이전 연구8)에서 차량 시뮬레이터, VANET(Vehicular Ad-hoc Network) 시뮬레이터, V2X 통신 단말기, 운전 조작장치(휠, 페달)가 포함된 Integrating Driving Hardware-in-the-Loop(IDHIL) 시뮬레이터를 개발하였다. 또한 신호등 정보를 반영한 에코 드라이빙 속도 가이드 시스템을 적용하여 하이브리드 차량(HEV)의 연비를 평가할 수 있는 환경을 구축했다.
본 논문에서는 기존 연구에서 구축된 IDHIL 시뮬레이터를 사용하여 일반적인 하이브리드 자동차(HEV)와 V2I 통신 기반 에코 드라이빙을 이용하는 커넥티드 하이브리드 자동차(CHEV)를 연비 관점에서 비교한다.
2. HEV 시스템
2.1 HEV 모델
본 연구의 대상 차량은 Fig. 1과 같이 Transmission Mounted Electric Device(TMED) 타입의 병렬형 HEV이다. FD는 Final drive(종 감속기), TM은 Transmission(변속기), MG1은 구동용 모터, ENG는 엔진, MG2는 시동용 모터, BAT는 고전압 배터리, CL은 클러치를 나타낸다.

Architecture of HEV system
HEV 시스템은 Fig. 2와 같이 Matlab/Simulink 환경에서 dSPACE의 ASM과 함께 구현되었다. Soft ECU 블록은 동력분배 알고리즘과 모드 결정 알고리즘으로 구성된 HCU(Hybrid Control Unit)와 세부 모델의 제어기로 구성된다. Engine 블록은 가솔린 엔진 기본 모델과 연료 소모량 계산 모델로 구성된다. Drivetrain 블록은 크랭크 샤프트, 클러치, 변속기, 종 감속기 모델로 구성된다. Vehicle dynamics 블록은 타이어, 공기저항, 브레이크, 서스펜션, 스티어링 등과 같은 차량 동역학 모델로 구성된다. Environment 블록은 운전자, 도로, 트래픽 모델로 구성된다. Electric system 블록은 MG1, MG2, 고전압 배터리 모델로 구성된다. 하이브리드 차량 및 구성요소의 주요 파라미터는 Table 1과 같다.

Vehicle model in Matlab/Simulink with dSPACE ASM

Vehicle system parameters
Fig. 3은 엔진의 OOL(Optimal Operating Line), 최대 토크, BSFC(Brake Specific Fuel Consumption)맵을 나타내는 성능맵이다. Fig. 4는 MG1의 효율맵과 최대, 최소 토크를 나타내는 성능맵이다. Fig. 5는 MG2의 효율맵과 최대, 최소 토크를 나타내는 성능맵이다.

Performance map of engine

Performance map of MG1

Performance map of MG2
2.2 Hybrid control unit (HCU)
HCU는 Fig. 6과 같이 규칙 기반(Rule-based) 모드결정 알고리즘과 동력분배 알고리즘으로 구성된다.9) 모드결정 알고리즘은 배터리 충전 상태(SOC), 운전자 페달 조작 등 주행 상황에 따라 주행모드를 결정한다. 동력분배 알고리즘은 주행모드, 페달 조작, 차량 상태에 따라 엔진, 구동 모터의 토크 명령 값을 계산한다.

HCU developed in Simulink
모드결정 알고리즘은 Fig. 7과 같이 Stateflow 환경에서 개발되었으며 페달, 요구 토크, SOC, 기어 상태 등에 따라 모드가 천이된다.

Mode decision algorithm developed in Stateflow

3. 시뮬레이션
3.1 시뮬레이션 환경
기 구축된 IDHIL 시뮬레이터를 이용한 시뮬레이션환경은 Fig. 9와 같다. V2X 통신 단말기를 통해 신호등 정보를 받고 이를 이용해 에코 드라이빙 속도를 도출한다. 에코 드라이빙 속도는 시각적으로 운전자에게 제공한다.

IDHIL simulator environment
3.2 시뮬레이션 시나리오
시뮬레이션 시나리오는 Fig. 10과 같이 요약된다. 가상 도로와 신호등 위치는 실측 된 정보를 기반으로 구축하였다. V2I 통신으로 받은 신호등 정보에 따른 변화를 확인하기 위해 교통량은 없는 것으로 가정한다. 운전자는 도로 제한속도(60 km/h)와 교통 신호를 준수하고 에코 드라이빙 속도를 따르도록 운전한다. 운전자에 의한 변수를 줄이기 위해 한 명이 운전을 하며 일반적인 HEV(NHEV)와 커넥티드 HEV(CHEV) 두 케이스를 각각 3회씩 수행한다. NHEV는 에코 드라이빙 가이드를 제공하지 않고 CHEV는 에코 드라이빙 가이드를 제공하는 케이스이다. 두 케이스 모두 동일한 HCU를 적용한다.

Simulation scenario with the driving path and traffic lights
3.3 시뮬레이션 결과
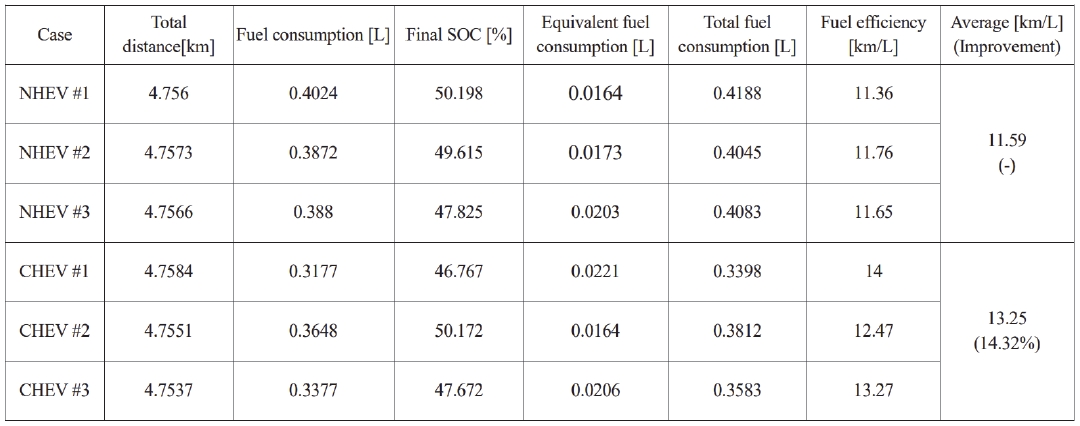
시뮬레이션 결과로부터 계산된 연비는 Table 2와 같이 정리된다. NHEV의 연비는 각각 11.36, 11.76, 11.65 km/L이고, CHEV는 각각 14, 12.47, 13.27 km/L이다. NHEV의 평균연비는 11.59 km/L이고 CHEV는 13.2 km/L이며, NHEV 대비 CHEV의 연비 개선율은 14.32 %이다.
Simulation results
운전 조작 장치가 장착 되어있는 시뮬레이션 환경에서는 동일한 시나리오임에도 운전자의 페달 조작이 달라진다. 그렇기 때문에 주행 속도의 차이가 발생하며 이로 인해 엔진과 모터의 작동이 시험을 진행할 때마다 달라진다. 이로 인해 총 연료 소모량과 최종 SOC가 매 시험마다 달라진다. 따라서 최종 SOC의 차이를 보상하기 위해 SOC 소모량을 기반으로 등가 연료 소모량(Vfuel,e)을 다음과 같이 계산한다.
| (1) |
- where SOCinit : initial state of charge (%)
- SOCfinal : final state of charge (%)
- Vbat : battery voltage (V)
- Qbat : battery capacity (kAh)
여기서 α(=8.9 kWh/L)는 1리터 가솔린을 전기 에너지로 환산하기 위한 단위 환산 계수이다. Fig. 11은 시뮬레이션 결과에서 차량 속도를 나타낸다. Fig. 12는 연료 소모량 결과를 나타낸다. Fig. 13은 SOC 결과를 나타낸다.

Simulation results: vehicle speed

Simulation results: fuel consumption

Simulation results: SOC
Fig. 14에서는 NHEV #1과 CHEV #1의 차량 속도 결과를 보여준다. 두 케이스는 신호등 진입시에 큰 차이를 보인다. NHEV의 경우 신호등 정보를 이용하지 않기 때문에 모든 신호등에서 정차하였다. 반면 CHEV의 경우 신호등에 접근하기 전에 에코 드라이빙 속도에 따라 주행하여 신호등에서 정차하지 않았다.

Comparison of vehicle speed between NHEV #1 and CHEV #1
Fig. 15는 엔진 성능맵에 NHEV #1과 CHEV #1 케이스의 엔진 동작점을 보여준다. 두 경우 동일한 제어 알고리즘을 사용하였기 때문에 동작 영역이 유사하다. 하지만 NHEV #1에서 비교적 엔진 사용량이 많은 것을 알 수 있다.

Comparison of engine operating point between NHEV #1 and CHEV #1
시뮬레이션 결과를 바탕으로 CHEV는 NHEV와 비교하여 신호등에서 정차를 하지 않았다. HEV는 제동 시에 모터를 사용하여 회생제동을 통해 에너지 손실을 줄이는 장점이 있다. 그럼에도 정차 후에 다시 가속하는 것은 엔진 사용량이 증가하게 되고 에너지 손실을 증가시켜 연비가 낮아지게 되는 요인이 된다.
4. 결 론
V2X 통신을 실시간으로 할 수 있는 IDHIL 시뮬레이터를 통해 V2X 정보를 반영한 연비 시뮬레이션이 가능한 환경을 구축했다. 여기서 신호등 정보를 받아 신호등에서 정차를 줄일 수 있는 에코 드라이빙 시스템을 적용하여 HEV의 연비 시뮬레이션을 수행하였다. 일반적인 NHEV대비 에코 드라이빙이 적용된 CHEV는 14.32 %의 연비 개선 효과를 얻을 수 있다.
- 1) V2I 통신을 활용하여 적색 신호를 회피하고 정차 빈도를 줄일 수 있다.
- 2) 하이브리드 차량은 모터를 사용해 회생제동을 하여 제동 시 에너지 손실을 줄일 수 있는 시스템이다. 그럼에도 불구하고 신호등에서 정차하는 것은 연비를 낮추는 요인이 된다.
- 3) V2I 통신을 적용한 에코 드라이빙을 이용해 정차 빈도를 줄이고 엔진 사용량을 줄이는 것을 통해 HEV 연비가 14.32 % 개선될 수 있다.
Acknowledgments
이 논문은 2023년도 정부(과학기술정보통신부)의 재원으로 정보통신기획평가원의 지원을 받아 수행된 연구임(No.2021-0-01414, 현실-가상정보 융합형 엣지기반 자율주행 시뮬레이션 SW 기술개발).
References
-
P. Zhang, H. Zhang, X. Sun, P. Li, M. Zhao, S. Xu, X. Jiao, Z. Sun and T. Zhang, “Research on Carbon Emission Standards of Automobile Industry in BRI Participating Countries,” Cleaner and Responsible Consumption, Vol.8, Paper No.100106, 2023.
[https://doi.org/10.1016/j.clrc.2023.100106]

-
S. Kim, “Network Requirement in Teleoperation of Autonomous Vehicle,” Transactions of KSAE, Vol.31, No.4, pp.239-246, 2023.
[https://doi.org/10.7467/KSAE.2023.31.4.239]
-
S. Kim, J. Lee, S. Yu, K. Jeong, J. Park and J. Park, “Cooperative Automated Vehicle System for Avoiding Road Work Zone Using Dynamic Infrastructure Information,” Transactions of KSAE, Vol.28, No.3, pp.167-177, 2020.
[https://doi.org/10.7467/KSAE.2020.28.3.167]
-
F. Zhang, X. Hu, R. Langari and D. Cao, “Energy Management Strategies of Connected HEVs and PHEVs: Recent Progress and Outlook,” Progress in Energy and Combustion Science, Vol.73, pp.235-256, 2019.
[https://doi.org/10.1016/j.pecs.2019.04.002]
-
C. Zhang, A. Vahidi, P. Pisu, X. Li and K. Tennant, “Role of Terrain Preview in Energy Management of Hybrid Electric Vehicles,” IEEE Transactions on Vehicular Technology, Vol.59, No.3, pp.1139-1147, 2010.
[https://doi.org/10.1109/TVT.2009.2038707]
-
C. Zheng, G. Xu, K. Xu, Z. Pan and Q. Liang, “An Energy Management Approach of Hybrid Vehicles Using Traffic Preview Information for Energy Saving,” Energy Conversion and Management, Vol. 105, pp.462-470, 2015.
[https://doi.org/10.1016/j.enconman.2015.07.061]
-
M. Hofstetter, M. Ackerl, M. Hirz, H. Kraus, P. Karoshi and J. Fabian, “Sensor Range Sensitivity of Predictive Energy Management in Plug-in Hybrid Vehicles,” 2015 IEEE Conference on Control Applications(CCA), pp.1925-1932, 2015.
[https://doi.org/10.1109/CCA.2015.7320891]
-
G. Lee, S. Ha and J. Jung, “Integrating Driving Hardware-in-the-Loop Simulator with Large-Scale VANET Simulator for Evaluation of Cooperative Eco-Driving System,” Electronics, Vol.9, No.10, Paper No.1645, 2020.
[https://doi.org/10.3390/electronics9101645]
-
K. Jeong, S. Ha and H. Lee, “Supervisory Control Algorithm Design of a 48 V 4WD Hybrid Electric Vehicle with Fuel Efficiency Analysis,” Transactions of KSAE, Vol.26, No.1, pp.131-141, 2018.
[https://doi.org/10.7467/KSAE.2018.26.1.131]