차세대 전기차 개발을 위한 파워트레인 도메인 전기전자 아키텍처 연구

Copyright Ⓒ 2023 KSAE / 208-02
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
The purpose of this research is to select an electrical and electronic architecture concept of the powertrain domain that will be applied to electric vehicles after 2025. Previously, automobile electrical and electronic architecture was determined only after trend analysis, but the purpose was to determine scenarios based on data and to select them with clear evaluation indicators. First, the functional feature list was defined. Then, the scenario candidates were organized by using the functional feature list. Finally, an architectural scenario was selected after performing functional architecture modeling with evaluation indicators. As for the powertrain domain of electric vehicles according to the research results, the DCU and VCU integrated architecture was selected as an architectural concept that can be applied to the next-generation electric vehicle. In terms of cost, it was unfavorable or at the same level, but it was superior under most indicators, including stability, security, and hardware demand.
Keywords:
E/E architecture, EV powertrain, Centralized architecture, Next-generation electric vehicle키워드:
전기전자 아키텍처, 전기차 파워트레인, 중앙 집중형 아키텍처, 차세대 전기차1. 서 론
전동화 시장은 2016 ~ 2025년 간 연평균 24 ~ 31 % 성장이 예상되고 있다.1) 이렇게 급성장하는 사유로는 주요 지역들이 공통적으로 연비 규제를 년 4 ~ 5 % 이상 지속적으로 강화할 예정이기 때문이다. 2025년 미국은 97, 유럽은 68 ~ 78, 중국은 93(CO2 g/km)로 연비 규제가 강화될 예정이다. 그리고 프랑스 파리는 노후 경유차량 진입을 금지하고 있으며, 영국 런던에서는 전기자동차 및 하이브리드 차량에 대한 혼잡세를 면제하고 있다. 향후 자율주행 및 커넥티비티 자동차가 확산되면 전력 소요량이 증가하여 전동화가 필수로 자리잡게 된다.2) 맥킨지 설문 결과를 보면 미국 및 독일에서는 30 ~ 45 % 소비자들이 전기차를 구매할 의사가 있다고 하였다.3) 하지만 연비규제 대응 중심의 공급자 주도적 전동화 시장으로 인한 수익성 확보의 어려움이 예상된다. 시장 예측 상으로 ’25 ~ ’30년 사이에 전기자동차의 수익성이 내연기관차를 수익성을 역전할 전망이다. 이 시기는 전동화에 대한 기술 및 원가경쟁력을 보유한 완성차 업체만 생존이 가능한 시기라고 보고 있다.1) 그래서 ’25년 이후는 전기자동차로 미래 요구사항 및 연비를 대응하는 것이 유리하기 때문에 전기자동차의 전기전자 아키텍처 연구가 중요하다고 판단하고 있다. 본 논문에서는 차세대 전기차 개발을 위해서 내연기관 자동차 대비해서 유일하게 차이점이 있는 파워트레인 도메인의 기능 로직들의 재분배를 통해서 미래 모빌리티 요구사항에 부합하는 전기전자 아키텍처 컨셉을 제안하고자 한다.
2. 본 론
2.1 전기자동차 전기전자 아키텍처 동향
미래 자동차에 대한 전기전자 아키텍처 트렌드 및 로드맵을 조사한 결과, 도메인 집중화 구조에서 도메인 퓨전 구조를 지나서 향후 차량 컴퓨터 구조로 적용이 확대될 예정이다.4) 전기 자동차의 경우, 현재 도메인 집중화 구조로 개발 및 양산을 진행하는 완성차 업체가 다수이며 신생 전기자동차 업체의 경우, 도메인 퓨전 구조로 신규 개발을 진행 중이다. 전기자동차의 파워트레인 도메인에 대한 제어기 간 기능 분배를 통해서 최적화된 아키텍처 컨셉 개발이 필요한 시점이다.

Electrical and electronic architecture trend
2.2 기능 특성 항목 정의
2025년 이후 양산할 전기자동차에 대한 파워트레인 도메인 기능 특성 항목을 정의하였다. 기능 특성인 Vehicle speed control 등 35개 항목을 정의하였고 담당 전문가들과 협의하여 31건 기능 특성을 Table 1과 같이 반영하기로 협의하였다.

Functional feature list definition
그리고 이 기능 특성 기반으로 기능 모델링을 하기 위한 기능 모듈 46개를 정의하였고 46개 중에서 전기차 파워트레인 도메인에 중앙집중형 제어기가 생긴다면 상위 혹은 하위 제어기로 이동 가능한 기능 모듈을 선정하였다. 25개 기능은 상위 제어기인 중앙집중형 제어기에 이동 가능한 모듈이고 나머지 21개 기능은 제어기 본연의 기능으로 하위 제어기로 남는 것으로 결정하였다. 이동 분류 결과는 Table 2와 같다.
Classification of movable functions by controller
2.3 전기전자 아키텍처 컨셉 시나리오 연구
미래 모빌리티 대응을 위해서 DCU(Domain Control Unit), VCU(Vehicle Control Unit) 기반의 시나리오를 도출하였다. DCU, VCU, MCU(Motor Control Unit), BMS(Battery Management System), ICCU(Integrated Charging Control Unit), VCMS(Vehicle Charging Management System) 제어기들과 정의된 특성 항목 기반으로 차세대 전기자동차의 파워트레인 도메인 아키텍처 컨셉 시나리오를 개발하였다. 총 17개의 시나리오를 도출하였고 자동차 제조사(H사) 전기차 파워트레인 제어기 설계 및 아키텍처 담당자 10명, 자동차 부품사(B사, C사) 설계 담당자 10명, 총 20명을 대상으로 설문을 진행하였다. 17개의 시나리오에 대해서 설문을 진행하여 선호도가 높았던 4개의 시나리오를 선정하였고 결과는 Fig. 2와 같다.

Electrical and electronic architecture concept scenario
1번 시나리오는 DCU와 VCU가 모두 적용된 시나리오이고 DCU는 기능의 중앙 집중형 아키텍처를 구현할 수 있고 VCU는 현 전기자동차에 적용된 제어기로 차량 제어 장치를 나타낸다. DCU와 VCU의 차이점은 DCU는 기능의 중앙 집중화를 위해서 고성능의 제어기가 적용되어야 하지만 VCU는 차량 제어기 간의 조정 기능을 담당하므로 저가의 CPU 적용이 가능하다.
2번 시나리오는 DCU가 적용되지 않는 분산형 아키텍처로서 각 제어기들 본연의 기능에 맞도록 기능들을 분산해서 적용하고 일부 신규 기능들은 VCU에서 담당하게 된다.
3번 시나리오는 VCU를 적용하지 않고 VCU에 적용된 기능을 DCU에 통합하는 아키텍처이다.
4번 시나리오는 2번 시나리오와 같이 분산형 아키텍처이지만 차이점은 충전 기능을 VCMS라는 충전 전용 제어기에서 관리하게 되는 시나리오이다. 전 시나리오에 적용된 ICCU는 충전과 컨버터 통합 모듈이다.
VCU는 다양한 기능을 구현하는 여러 동력장치 기능을 제공한다. 그러나 리소스(컴퓨팅 능력/RAM/ROM)의 제한으로 인해 VCU는 많은 추가 기능을 통합할 리소스가 없다. 반면, DCU는 통합 플랫폼으로 간주된다. 즉, DCU를 사용하여 많은 추가 기능을 통합할 수 있으므로 DCU에는 VCU보다 훨씬 많은 H/W 리소스가 있다. 따라서 통합 플랫폼을 통해 차량에 새로운 기능을 제공할 수 있다. 통합 플랫폼의 기본 원칙은 새롭고 혁신적인 기능을 통합 플랫폼에 쉽게 통합할 수 있어야 한다는 것이다. 통합 플랫폼은 업데이트가 빈번하지만 하위 제어기들은 안정적이고 업데이트 빈도가 훨씬 낮게 된다. 이렇게 하면 하나의 제어 장치만 자주 업데이트하면 되므로 개발 비용을 최소화할 수 있다. 앞서 언급한 측면 외에도 DCU는 해당 영역에 대한 추가적인 게이트웨이 역할을 한다. 즉, 모든 영역 내부 통신이 DCU에서 종료되며 차량의 나머지 부분과의 모든 통신은 이 게이트웨이를 통과해야 한다. 두 가지 이점은 첫 번째는 추가적인 보안 계층에 있고 두 번째는 OTA(Over The Air) 마스터의 기능에 있다. OTA 마스터는 고속 통신을 통해 새 S/W를 자동으로 수신하며, 동력장치 영역 내에서 느린 CAN 통신을 통해 언제든지 편리한 시간에 새로운 S/W를 구현할 수 있다. 통신 네트워크에 DCU가 논리적으로 통합되어 있기 때문에 그것은 이른바 크로스 도메인 기능을 제공하기 위한 목적을 가진다. 이러한 크로스 도메인 기능은 이미 존재하는 센서 신호를 사용하여 다른 영역의 작동을 활성화하는 기능이다. 그 예로는 낮은 전압(12V 배터리 센서 데이터, 고전력 소모 장치의 전원 정보)의 정보와 고전압 전원망 정보(추진에 사용되는 전력, DC/DC 전력 요청)를 결합하여 차체 영역의 편의 기능을 저하시키는 ‘전기 에너지 관리’가 있다. 또 다른 예는 차량 내 공기 조절 요청으로부터 입력을 받아 동력장치 영역에서 고전압 부품의 냉각 요구를 관리해야 하는 ‘열 관리’이다.5) 선제적으로 미래 모빌리티 요구사항에 대응하기 위한 전기전자 아키텍처가 선정되어야 한다.
2.4 기능 아키텍처 모델링
4개 시나리오에 대한 정량적/정성적 평가를 위해 IBM사의 랩소디 툴을 활용하여 Fig. 3과 같이 기능 아키텍처 모델링6)을 진행하였다. 앞서 정의한 기능 특성을 모델링하고 모델링 데이터를 각 제어기에 분배하였다.

Functional architecture modeling concept
기능 모듈 내에는 평가지표로 활용할 수 있는 ASIL과 같은 기능 안전 레벨, 연산부하, RAM 및 ROM 사이즈, 충전 중 동작 여부에 대한 속성을 부여하였다. 이 기능 모듈을 기반으로 각 기능 특성별로 상위 및 하위 기능에 대한 구분을 진행하였다.
2.5 전기전자 아키텍처 컨셉 시나리오 평가
아키텍처 컨셉 시나리오 평가를 위해서 주요 평가지표를 선정하였다. 보쉬 및 벡터사에서 발표한 평가지표 16개를 취합하였고 전문가 설문을 통해서 선호도가 높았던 6개의 평가지표를 채택하였다. 선정된 지표는 Electronic cost(원가), Expandability / Updatability(확장성/업데이트 용이성), Safety(안전 요구사항 대응 용이성), Validation effort(검증 공수), Hardware demand(하드웨어 요구사항), Number of ECUs active in charging process(충전 중 깨어나는 ECU 개수)이다. 시나리오 평가를 위해서 평가지표 관련 속성을 정의했는데 안전 요구사항으로 ASIL 레벨을 정의하였고, 하드웨어 요구사항으로 연산부하, RAM/ROM 사이즈를 적용하였다. 평가의 기본은 랩소디 모델에 포함된 정보로 하였고 기능 요소와 그의 인터페이스 외에도 랩소디 모델의 각 기능 요소에 추가적인 특성이 첨부되었다.
Fig. 4는 랩소디 모델의 기능 요소와 관련된 ‘태그’를 보여주는 랩소디 도구로서 ASIL 분류(기능 안전), 필요한 프로세서 로드 및 해당 기능 요소의 RAM/ROM 크기에 대한 정보가 포함된다. 해당 정보를 이용하여 시뮬레이션을 진행하여 시나리오 별로 정량적인 평가를 진행할 수 있다. 파워트레인 도메인에 대한 전기전자 아키텍처 선정을 위해서 각 평가지표별로 가중치를 적용하였다. 평가별 가중치 역시 전문가 설문을 통해서 점수를 받았고 점수의 평균값을 최종 가중치로 결정하였다.

Quantitative evaluation properties
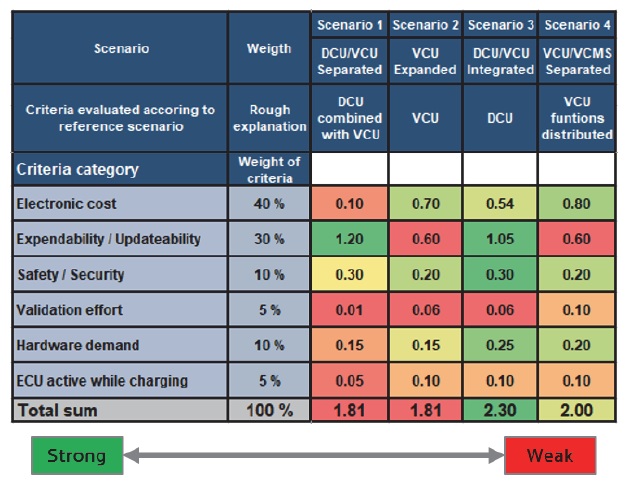
평가별 가중치는 원가 40 %, 확장성/업데이트 용이성 30 %, 안전 및 보안 요구사항 대응 용이성 10 %, 검증 공수 5 %, 하드웨어 요구사양 10 %, 충전 중 깨어나는 ECU 개수 5 %로 결정하였다. 파워트레인 도메인 설계팀 및 전기전자 아키텍처 개발 담당자들과 글로벌부품업체 아키텍처 전문가들과 협의하여 아키텍처 평가를 진행하였다. 최종 평가 결과는 위에 Table 3과 같다. ‘원가’의 경우, VCU / VCMS(Vehicle Charging Management System) 분리형이 최상으로 평가되었다. 추가적인 H/W가 필요하지 않기 때문에 다른 시나리오들에 비해 추가적인 개발 비용도 불필요한 시나리오였다. ‘확장성/업데이트 용이성’ 지표에 대해서는 VCU 및 DCU를 모두 포함하는 DCU / VCU 분리형 시나리오가 기능 할당 유연성이 높기 때문에 가장 높게 평가되었다. DCU / VCU 통합형도 새로운 기능을 유연하게 도입하고 업데이트할 수 있다고 판단하였고 VCU만 사용하는 두 시나리오는 확장성 및 업데이트 가능성이 낮은 ECU 사용으로 평가 등급이 높지 않았다. ‘보안’에서도 시나리오 DCU / VCU 통합형 및 DCU / VCU 분리형은 DCU의 강력한 보안 기능으로 인해 평가가 높았다. ‘안전’은 다양한 기능의 분포에 따라 달라졌다. 4개의 시나리오 중에서 VCU 확장형 및 DCU / VCU 통합형의 평가가 우수하였다. ‘검증 공수’는 루프 시험에서 하드웨어에 대한 요구사항으로 ECU 수에 따라 증가한다. DCU / VCU 분리형 시나리오는 다른 시나리오에 비해 ECU 수가 많기 때문에 단점이 있다. VCU / VCMS 분리형 시나리오가 ECU 인터페이스 수가 낮기 때문에 가장 잘 평가되었다. DCU / VCU 분리형 시나리오는 ECU 수가 많고 하부 제어 장치에 대한 추가 인터페이스를 생성하는 중앙 집중화 경향으로 인해 가장 좋지 못한 평가를 받았다. ‘하드웨어 요구사항’에 대한 프로세서 부하의 경우, RAM 및 ROM 크기 및 해당 비율의 부하를 고려해야 한다. DCU / VCU 분리형 시나리오에서 H/W 사용량은 동일한 S/W 양에 대한 추가 제어 장치가 하나이기 때문에 낮은 편이었다. VCU 확장형 시나리오에서는 제한된 H/W 리소스로 인해 VCU에 대한 추가 부하가 문제될 수 있었다. 이로 인해 VCU에 신규 개발이 필요한 새로운 H/W 구성 요소가 요구된다. 하부 제어 장치의 변경 사항이 없을 것으로 예상된다. DCU / VCU 통합형 시나리오의 경우, 충분한 H/W 성능을 사용할 수 있기 때문에 DCU 기능의 양은 관련이 없었다. 하부 제어 장치의 변경은 중요하지 않으므로 좋은 평가 결과를 받았다. 파워트레인 도메인만 고려하는 경우, ‘충전 중 활성화되는 ECU 수’는 실제로 관련이 없었다. DCU에 충전에 관련된 기능이 있기 때문이었다. 이 기준으로 전체 차량 전기전자 아키텍처 연구를 살펴보는 것이 흥미로울 것으로 생각되었다.
Architecture concept scenario evaluation
일반적으로 DCU / VCU 통합형 시나리오는 실제 도메인 제어 장치, 즉 파워트레인 도메인에서 마스터 역할을 포함하는 전기전자 아키텍처를 반영한다. 파워트레인 도메인에서 타 도메인을 연결하는 게이트웨이 역할을 하며 파워트레인 도메인의 모든 조정 기능을 포함한다. 즉, DCU가 도메인 수준에서 동력장치의 모든 관련 기능을 제어하고 차량을 향한 동력장치 영역을 나타낸다. 이 시나리오에서는 도메인 제어 장치가 BMS, MCU 및 ICCU와 같은 기존 제어 장치 외에 새롭게 구현해야 하는 고성능의 제어 장치이기 때문에 비용 상의 단점이 있는 반면에 DCU는 통합 플랫폼 역할을 하고 이를 통해 새로운 기능과 특성을 쉽게 통합할 수 있다. 또한 파워트레인 도메인에서 OTA 마스터 역할을 할 수 있으며 해당 도메인에 대한 보안 조치를 통합할 수 있다. 그리고 하위 제어기들은 표준화 및 플랫폼화를 통한 원가 절감이 가능하다.
Fig. 5와 같이 컨셉 시나리오 평가 비교를 통해서 DCU / VCU 통합형 시나리오가 가장 우수한 컨셉으로 선정되었다. 제어기 기준으로 원가는 상승하나 확장성, 업데이트 용이성, 안전 및 보안 요구사항 대응이 우수한 결과를 얻었다. 전문가의 설문 조사에 의해서 원가 및 확장성/업데이트 용이성의 가중치가 70 %로 상당히 높았기 때문에 상대적으로 Hardware demand와 ECU active while charging의 결과가 상대적으로 영향이 없게 나왔다. 전문가 별로 중요하게 보는 지표가 다르기 때문에 이런 결과가 나온 것으로 판단하고 있다. 향후 Fig. 6과 같이 선정된 파워트레인 도메인 전기전자 아키텍처 컨셉을 기반으로 타 도메인 기능을 포함한 차량 레벨 전기전자 아키텍처를 구성할 예정이다.

Architecture scenario assessment comparison

Electric vehicle powertrain domain architecture concept
3. 결 론
본 연구를 통해서 차세대 전기차의 파워트레인 도메인의 전기전자 아키텍처는 DCU 기반의 중앙 집중형 아키텍처로의 방향성을 확인할 수 있었다. 기존 논문들7,8)은 기술 트렌드를 분석해서 결과를 도출하였으나 본 논문은 기능 모듈 데이터 기반의 기능 아키텍처 모델링을 통해 결과를 도출한 점이 다르고 자동차 제조사와 부품사 전문가들의 협의를 통해서 평가지표와 시나리오 후보군을 선정한 것도 차별화가 있다고 할 것이다. 기존에는 자동차 제조사들이 문서 기반으로 전기전자 아키텍처를 결정하였지만 해당 논문을 통해서 데이터 기반의 전기전자 아키텍처 방법론에 대해서 검증하였고 차세대 전기차의 경우, 기능의 복잡도가 올라갈 예정으로 문서 기반의 아키텍처 방법론의 한계를 데이터 기반의 아키텍처 방법론으로 해결할 수 있음을 확인할 수 있었다. 해당 방법론을 통해서 다음과 같은 효과를 얻을 수 있음을 확인하였다.
- 1) 기능 아키텍처 모델링을 통해서 제어 기능에 대한 집중형 아키텍처를 구현할 수 있으며, 전기차 전용 파워트레인 도메인 아키텍처는 융복합 기능 확장, 무선 S/W 업데이트 및 업그레이드, 보안 및 ICT 연계 기능 대응 등과 같은 미래 기술에 대한 요구사항을 효과적으로 대응할 수 있다.
- 2) DCU 제어기 중심의 원격 제어, 원격 진단, 음성 제어, ICT 연계 기능 대응 등의 신기능 대응으로 차량 레벨의 개발 비용 절감 및 개발 일정 축소가 가능하다. 또한 기존의 하위 레벨의 제어기인 시스템 제어기는 H/W 기반의 표준화 및 플랫폼화를 통한 원가 최적 설계가 가능하다.
- 3) 전기차 파워트레인 도메인에 대한 기능 아키텍처는 현 기능 사양과 매칭성이 우수하고 신기능 중심의 DCU 기능 재분배를 통해 양산 개발 품질을 조기 확보할 수 있다.
연구의 한계는 전기차의 파워트레인 도메인으로만 전기전자 아키텍처를 진행하였는데 파워트레인 도메인 외에 샤시 도메인, 바디 도메인, 인포테인먼트 도메인, ADAS 도메인 등 타 도메인의 전기전자 아키텍처도 함께 진행하여 차량 레벨의 전기전자 아키텍처연구를 통해 전체 방향성을 수립하는게 필요하다.
References
- Daishin Securities’ Material Research team, Electric Vehicles, E-GMP Based Ionic 5 is about to be Released, 2020.
- J. Park, “Next Generation E/E Architectural Design Trends for Self-Driving Cars,” Journal of the Korean Communications Society, Vol.33, No.4, pp.17-26, 2016.
- O. Tonby, J. Woetzel, R. Razdan, W. Choi, N. Yamakawa, J. Seong and T. Devesa, “The Future of Asia: The Trailblazing Consumers in Asia Propelling Growth,” Mckinsey Global Institute, 2021.
-
V. Bandur, G. Selim, V. Pantelic and M. Lawford, “Making the Case for Centralized Automotive E/E Architectures,” IEEE Transactions on Vehicular Technology, Vol.70, No.2, pp.1230-1245, 2021.
[https://doi.org/10.1109/TVT.2021.3054934]

- H. Kim, “Electric Vehicle Battery Thermal Management Technology,” Mechanical Journal, Vol.61, No.2, pp.40-45, 2021.
-
T. Mielke, M. Negrean, W. Lu, J. Rox and J. Gacnik, “Managing Distributed Systems Development through Model-Based E/E Architecture Design,” SAE 2015-26-0012, 2015.
[https://doi.org/10.4271/2015-26-0012]
-
S. Jiang, “Vehicle E/E Architecture and Its Adaptation to New Technical Trends,” SAE 2019-01-0862, 2019.
[https://doi.org/10.4271/2019-01-0862]
- B. Jeon, “The Evolution of Future Automotive Powertrain Systems Led by Electronic and Intelligent Technologies,” Auto Journal, KSAE, Vol.44, No.5, pp.61-66, 2022.