UN R79 만족 위한 EPS System의 Braking Torque에 대한 고찰

Copyright Ⓒ 2023 KSAE / 207-09
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
EPS(Electric Power Steering), whose merits include fuel efficiency, driver's convenience, environmental-friendliness, and reliable maintenance, has continuously evolved to achieve high power, low friction, noise, and ripple. The motor embedded in EPS accounts for a major portion of the required characteristics. Hence, many studies on EPS and motors have been conducted and are ongoing. Steering systems should satisfy global regulations, especially UN R79 for type approval prior to manufacture and sale. This paper focuses on motor failure cases, consequently resulting in braking torque. For the theoretical explanation, mathematical models were derived, and a simulation program was developed to apply to various expected projects. Simulation results under various operational environments in which EPS was applied were verified through measurements and experiment results. Based on this study, the developing system can be analyzed to satisfy the UN regulation in terms of braking torque at the early stage of development, and may choose a dual wound motor to lower the braking torque, if required.
Keywords:
UN R79, Braking torque, Redundant, EPS(Electric power steering), Motor short failure키워드:
브레이킹 토크, 리던던트, 전동식 파워 스티어링, 모터 단락 고장1. 서 론
EPS(Electric Power Steering) 시스템은 운전자 편의성 제공, 연료효율 향상, 유지보수에서 장점을 가지며 높은 출력, 정숙성, 기능 향상, 안전성 강화를 위해 지속적으로 연구개발 되고 있다. 최근 자율주행차의 등장과 함께 주차 보조, 차선 유지, 차선 센터링, 차선 변경 등과 같은 자동명령조향기능(ACSF, Automatically Commanded Steering Function) 구현이 필요하여 EPS 시스템은 ADAS(Advanced Driver Assistance System)와 함께 협조제어가 되며 자율주행에 따라 운전자의 역할이 감소하는 대신 전자제어식 시스템의 기능이 증가하고 이에 따라 기능 안전을 강화하기 위해 리던던트 시스템으로 발전하게 되었다.
글로벌 시장에서 차량 형식승인 및 판매를 위해서는 UNECE WP.29(자동차기준 국제조화 회의)의 여러 규정들을 만족해야 하는데 조향 시스템은 이 중 No.79의 규정에 해당하며, 본 규정내 여러 항목 중 6항의 내용 상 ‘정상적인 또는 단일의 고장을 가진 차량이 10 KPH의 속도로 직선에서 나선으로 주행할 때 정해진 최대 운전자 조향조종력을 초과하지 않아야 한다.’ 조향조종력(단위 N)은 조향 토크(단위 Nm)에서 스티어링휠 반경을 나눈 값이며 EPS의 경우 모터의 단락(Short) 시, 모터에 의한 보조 토크가 발생하지 않을 뿐 아니라 모터 내 생성되는 순환 전류(Circulating current)로 인해 브레이킹 토크(Braking torque)가 발생하여 운전자 조향 토크를 크게 증가 시켜 위의 No.79 규정을 위배 할 수 있으므로 본 규정을 만족하도록 시스템을 설계할 필요가 있다.1-3)
모터의 단락을 여러 설계 사양과 고장 조건에 대해 분석을 진행하였다. 먼저 모터 단락은 하드웨어적으로 여러 형태로 발생할 수 있으며 접촉 조건별(하중, 침수상태)로 그리고 베이스 아키텍처(Base architecture)에 해당하는 단일 권선 모터와 앞서 언급된 안전 강화를 위한 리던던트 아키텍처(Redundant architecture)에 해당하는 이중 권선 모터의 경우에 대해 시스템 브레이킹 토크를 분석하였다.
본 연구는 여러 조건별 상이하게 나타나는 모터 단락에 따른 전체 시스템에 적용되는 운전자 토크식을 도출하였고 브레이킹 토크를 수학적으로 모델링하여 향후 활용상의 편리를 위해 시뮬레이션 프로그램을 개발하고 시험을 통해 결과물의 타당성을 입증하였다.
2. Braking Torque 이론 및 수식
2.1 Braking Torque
모터 권선내 단락이 발생하는 경우 단락된 권선 내에서 발생하는 순환 전류에 의해 아래의 계산식과 같이 정상 작동과 동일한 식으로 회전을 방해하는 토크가 생성된다.
| (1) |
where TB : Braking Torque, Nm
2.2 순환 전류(Circulating Current)
2.1 (1)식의 Id, Iq는 아래의 식과 같이 a, b, c상의 전류를 DQ 변환을 통해 구할 수 있다.
| (2) |
Ia, Ib, Ic 전류는 모터 내 여러가지 단락 케이스 별로 상이한 값을 가지며 아래 각각의 모터 권선 내 단락에 따른 회로에서 키르히호프 전압의 법칙에 따라 도출할 수 있다.

Circuit for phase-to-neutral short
| (3) |

Circuit for phase-to-phase short
| (4) |

Circuit for 3 phase short
| (5) |

3. 단품 및 시스템 레벨 검증
2장에서 도출한 이론식을 기반으로 엑셀 및 VBA 코딩을 통해 시뮬레이션 툴을 작성하고 이를 검증하기 위해 모터 단품 레벨에서 그리고 EPS 시스템 레벨에서 여러 조건별 시험을 실시하였다. 모터 단품 시험은 모터 다이나모미터를 활용하여 여러 속도별 발생하는 브레이킹 토크를 측정하였으며 시스템 레벨 시험은 개발단계의 시료 활용도의 제한으로 단일 권선 모터(Single wound motor)는 C-EPS(Column type Electric Power Steering) 그리고 이중 권선 모터(Dual wound motor)는 R-EPS(Rack type Electric Power Steering) 시스템으로 구성하여 토크미터기를 활용하여 측정하였다.
3.1 Single Wound Motor 검증
모터 내 회로 단락은 여러 형태로 나타날 수 있는데 아래 Fig. 5의 각각은 하나 그리고 모든 결선에 대한 Phase to neutral short, 22.5 mΩ의 저항이 추가된 Phase to phase short 그리고 3 Phase short별 시뮬레이션 결과와 실품 검증결과를 비교하였다. 실제 사용환경에서 전기전도도가 높은 순수한 구리(Cu)가 모터 내에서 유동하는 최악의 경우(Worst case)를 가정하여 실제 샘플에서 현상을 구현하여 22.5 mΩ의 별도 전선을 추가하여 시험에 반영하였다. Fig. 5의 4가지 단락 케이스 모두 2장에서 도출한 계산식으로 시뮬레이션한 결과와 실품 측정한 결과가 매우 일치함을 확인하였다.

Braking torque result for single wound motor

C-EPS(Column type electric power steering) system

Braking torque result for single wound motor in C-EPS
해당 모터를 활용하여 C-EPS 시스템 내 장착하여 시스템 레벨에서 UN R79에서 규정한 최대 4초의 지속시간 그리고 차량에 따라 상이하지만 차량제원에서 역으로 계산된 모터 100 RPM 조건에서 모터 단락의 영향성을 확인한 결과 Single phase to neutral, Multiple phase to neutral, 22.5 mΩ의 저항을 추가한 Phase to phase short에 대해 1 % 미만의 차이로 시뮬레이션과 측정 결과가 일치하였다.
3.2 Dual Wound Motor 검증
리던던트 아키텍처에 적용하기 위한 이중 권선 모터(Dual wound motor)는 해당 제품에 적용된 8극 12슬롯 모터에서 12 슬롯에 해당하는 12개의 권선을 두개의 회로로 나누어 6개의 권선을 ECU#1에 그리고 나머지 6개의 권선을 ECU#2에 연결한 구조로 3.1과 유사하게 이중 권선 모터와 이것이 적용된 시스템을 활용하여 하나의 권선에 대한 Single phase to neutral short, Single phase to phase short, 두개 권선 모두에 대한 3 Phase short, 하나의 권선에 대한 3 Phase short별 샘플을 제작하여 시뮬레이션과 실품 검증을 비교하였다.
Fig. 8의 4가지 단락 케이스 모두 2장에서 도출한 계산식으로 시뮬레이션한 결과와 실품 측정한 결과가 매우 일치함을 확인하였다.

Braking torque result for dual wound motor

R-EPS(Rack type electric power steering) system

Braking torque result for dual wound motor in R-EPS
해당 모터를 활용하여 R-EPS 시스템 내 장착하여 시스템 레벨에서 3.1과 동일한 조건으로 모터 단락의 영향성을 확인한 결과, Phase to neutral(Single fault)에 대해 1 % 미만의 차이로 시뮬레이션과 측정 결과가 일치함을 확인하였다. Phase to Neutral(Single Fault) 외의 경우는 측정 장비(토크 미터기)의 측정허용값을 초과하여 결과물을 얻지 못하였다.
4. 조건별 영향성 검토
4.1 접촉저항에 따른 영향성 검토
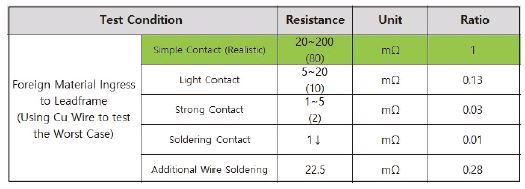
모터 내 회로 단락은 이물질 유입 또는 내부 부품의 파손에 따라 유동 중 모터의 권선 내 또는 리드프레임(Leadframe)에 접촉이 되어 나타날 수 있으며 Table 1은 다양한 접촉 조건을 가정하여 측정한 접촉저항으로 실제 환경에 해당하는 단순 접촉의 경우 20 ~ 200 mΩ의 저항을 가질 수 있으며 Fig. 11과 같이 접촉저항의 증가에 따라 브레이킹 토크는 감소함을 알 수 있다.

Contact resistance of motor leadframe

Braking torque result w.r.t contact resistance
4.2 침수조건에 따른 영향성 검토
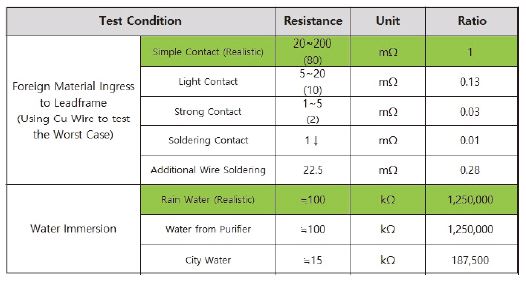
차량의 침수로 EPS 특히 모터 회로부가 완전히 침수되었을 경우를 검토하기 위해 Table 2와 같이 빗물, 수돗물 그리고 정수물에 모터 리드프레임 부위를 완전히 침수시켜 영향성을 검토한 결과 전선의 단순 접촉(80 mΩ)에 의한 단락 대비 침수조건에서는 매우 큰 저항(15 kΩ↑)을 가짐에 따라 순환 전류 및 브레이킹 토크는 거의 ‘0’에 가까우며 모터 마찰 토크만 측정됨을 확인하였다. 본 결과에 근거하여 모터 내 3상 단락에 의한 브레이킹 토크는 침수조건에서 매우 낮은 값을 가지며 이물질 유입에 따라 상간 단락은 발생 가능하나 이중 결함에 해당 되는 3상 단락은 발생 가능성이 매우 낮다고 할 수 있다.
Contact resistance w.r.t water immersion
5. 단일 그리고 이중 권선 모터 비교
Fig. 12의 ①은 단일 권선 모터의 Phase to phase short 경우 브레이킹 토크이며 ②는 이중 권선 모터의 Phase to phase short에 해당하는 브레이킹 토크를 보여준다. 단일 권선 모터의 경우는 단일 결함 발생 시 구동 토크를 발생하지 않으나 이중 권선 모터의 경우 단일 결함이 발생하지 않은 정상 권선에서 50 %의 토크(③)를 발생시켜 ②의 브레이킹 토크를 이겨내고 최종 ④의 토크를 생성할 수 있다. 본 결과의 의미는 이중 권선 모터를 적용할 경우 모터 단일 단락에도 불구하고 조향 작동이 가능하다는 것을 의미한다.

Braking torque result for single & dual wound motor
6. 결 론
- 1) 조향 시스템에 적용되는 UN R79 규정 상 단일 결함에 대해 정해진 최대 운전자 조향 토크를 초과하지 않아야 하는데 본 연구에서는 모터 내 Phase to neutral, Phase to phase short가 Single fault에 해당되며 3 Phase short 또한 참조를 위해 검토하였다.
- 2) Id, Iq, Iphase 계산식을 도출하여 모터 브레이킹 토크를 시뮬레이션 하였고 단일 권선 모터가 적용된 C-EPS 그리고 이중 권선 모터가 적용된 R-EPS 시스템을 대상으로 각 결함 케이스별로 실제품을 제작하여 테스트한 결과 시뮬레이션 결과와 일치하였다.
- 3) 실제 환경을 모사하기 위해 여러 접촉저항 조건별 브레이킹 토크를 시뮬레이션한 결과 접촉저항의 증가에 따라 브레이킹 토크가 감소하였고 추가 저항을 적용시킨 샘플 시험을 통해 시뮬레이션 결과를 검증하였다.
- 4) 침수조건에서 수돗물 등의 저항이 매우 크므로(단순 접촉의 약 20만배) 브레이킹 토크가 상당히 낮게 발생하여 침수로 인한 3상 단락은 우려할 수준이 아님을 확인하였다.
- 5) 리던던트 설계가 반영된 이중 권선 모터의 경우 단일 결함이 발생함에도 불구하여 나머지 정상 권선의 작동으로 최종적으로 조향 작동이 가능함을 시뮬레이션을 통해 검토하였다.
본 연구를 통해 모터 결함에 의해 발생하는 브레이킹 토크를 여러 결함 케이스 별로 수식을 세우고 모터 단품 그리고 시스템 레벨로 시험하여 검증을 하였으며 해당 브레이킹 토크에 의해 발생하는 조향조종력의 최대치가 UN R79에서 규정한 값을 초과하지 않음을 설계 초기에 검토 가능하며 이중 권선 모터를 적용하여 조향조종력을 다소 경감 시킬 수 있다.
Nomenclature
| L : | inductance of motor, H (Henry) |
| I : | current of motor, A (Ampere) |
| Ke : | B-EMF constant, Vph_pk ⋅ s/rad |
| Npole : | number of poles |
Subscripts
| d : | d(direct) axis |
| q : | q(quadrature) axis |
| a : | a phase of motor 3 phases |
| b : | b phase of motor 3 phases |
| c : | c phase of motor 3 phases |
References
- T. S. Kim, J. H. Shin, T. H. Sun and S. J. Jung, “A Study on Braking Torque of EPS System to Satisfy UNECE R79,” KSAE Fall Conference Proceedings, 2021.
-
B. M. Ebrahimi and J. Faiz, “Feature Extraction for Short-Circuit Fault Detection in Permanent-Magnet Synchronous Motors Using Stator-Current Monitoring,” IEEE Transactions on Power Electronics, Vol.25, No.10, pp.2673-2682, 2010.
[https://doi.org/10.1109/TPEL.2010.2050496]

-
R. Islam, M. Islam, J. Tersigni and T. Sebastian, “Inter Winding Short Circuit Faults in Permanent Magnet Synchronous Motors used for High Performance Applications,” Energy Conversion Congress and Exposition(ECCE), 2012.
[https://doi.org/10.1109/ECCE.2012.6342667]