효율적인 비례 제어 솔레노이드 밸브 구동을 위한 이종주파수 펄스폭변조 제어 기법

Copyright Ⓒ 2020 KSAE / 180-01
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
Solenoid valve is generally used for controlling the enormous mechanical machine in an automobile. The use of the PWM-driven solenoid has become common due to the inefficiency of driving a solenoid using the traditional on/off method in terms of power usage and solenoid coil burnout. In this paper, we conduct modeling and mathematical analysis in regard to the instantaneous current of the PWM-controlled solenoid valve with slow decay and fast decay. Furthermore, we propose a heterogeneous PWM-controlled scheme, which is considered to be a trade-off of power dissipation, electromagnetic interference, and response time. The simulation results verify the plausible performances of the proposed heterogeneous PWM-controlled scheme by demonstrating the solenoid valve response time via current driven based on the real parameters of the continuous damping control system.
Keywords:
Solenoid valve, Pulse width modulation, Response time, Power dissipation, Electromagnetic-interference, Acoustic noise키워드:
솔레노이드 밸브, 펄스폭 변조, 응답 시간, 전력 손실, 전자파 간섭, 가청 대역 소음1. 서 론
전자기술의 급속한 발전은 자동차 산업에도 많은 영향을 끼쳐 기계적인 제어방식들은 마이크로 프로세서를 포함한 전자제어 장치(Electronically controlled device)를 이용한 정밀한 전자제어방식으로 대체되었다. 자동차 내부의 거대한 기계 장치들을 동작시키기 위해 유체 또는 기체의 흐름을 제어하며 이때 솔레노이드 밸브를 사용한다. 솔레노이드 코일에 전류를 인가시켜 자기에너지를 발생시키고 이를 기계적인 에너지 형태로 변환하여 유체 또는 기체의 흐름을 차단 또는 통과시키거나 방향을 전환시킨다. 즉, 솔레노이드 밸브에 전류가 공급되면 솔레노이드 코일에 의해 전자기력이 발생되어 내측에 설치되는 코어가 전자석의 역할을 함으로써, 코어의 자력에 의해 스풀이 이동하여 유체 또는 기체의 유동 경로를 개폐시키거나 방향을 전환시키는 것이다.1)
에너지 변환장치 및 전자석으로 자주 사용되는 솔레노이드를 구동하기 위해서 일반적으로 사용하는 ON/OFF 방식을 사용하면 전력의 사용 측면에서 효율적이지 못하고 솔레노이드의 수명을 단축시킬 수 있기 때문에 일정한 주파수로 밸브의 ON과 OFF되는 시간의 비율(Duty cycle)을 조절하는 펄스폭 변조(PWM, Pulse Width Modulation) 구동 방식이 이미 보편화 되었다. 특히 비례 솔레노이드 밸브의 경우 적당량의 전류를 공급함으로써 오리피스를 통과하는 유체 또는 기체의 흐름을 제어할 수 있기 때문에 특정 솔레노이드 밸브 구동을 위해서는 필수적으로 PWM제어를 해야만 한다.2-4)
본 논문에서는 일반적인 솔레노이드 PWM 제어 방식에 대한 수학적/전기적인 모델링 및 설명을 하고, 제어 방법에 따른 응답성과 발열, EMI 간섭 및 잡음 수준 특성을 고찰 및 분석한다. 전자제어현가(ECS, Electronically Controlled Suspension)시스템에서 가변 댐퍼(CDC, Continuous Damping Control) 솔레노이드 밸브를 효율적으로 구동하기 위한 Heterogeneous frequency PWM 제어 방식을 제안한다.
2. 솔레노이드 코일 순시 전류 모델링
본 장에서는 PWM 제어 방식에 따른 솔레노이드 밸브 구동 회로 및 전류 모델을 소개한다.
2.1 Conventional One-side PWM Controlled Solenoid Coil
Fig. 1은 일반적인 솔레노이드 밸브 구동 회로의 구성을 보여준다. FET는 PWM신호로 구동되는 이상적인 전기 스위치로 동작된다. PWM OFF 시 스위치 접점 사이에서 일어나는 에어 갭을 통해 발생하는 ARC성 스파크를 방지하기 위해 Freewheeling 또는 Fly-back 용도의 다이오드(단방향 스위치)를 통해 PWM OFF 시 코일에 발생하는 역기전력을 막고 에너지를 환류 및 소비시키기는 역할을 한다.

PWM controlled solenoid valve driving circuit
Fig. 1(a) High-side 제어는 배터리와 부하 사이를 제어하며, 반면에 Fig. 1(b) Low-side 제어는 부하와 GND 사이를 제어한다. 컨넥터 단의 Fault 발생 시 회로에 따라 동작의 차이가 있으며, 설계자는 고장 상황을 고려하여 추가적인 보호회로를 설계하여야 한다. 이후 본 절에서는 Low-side 제어를 고려하여 일반적인 PWM 제어에 관하여 설명한다.
Fig. 2는 Low side PWM 제어 솔레노이드 밸브 구동 시의 등가회로를 보여준다. 솔레노이드 밸브는 저항 특성 R과 인덕턴스 특성 L의 직렬 연결의 등가 회로로 나타낼 수 있다.

Equivalent circuits for the low side PWM-ON/OFF states
Fig. 2(a)에서 나타내는 PWM ON 구간의 등가회로는 KVL(Kirchhoff Voltage Law) 에 의거하여 식 (1)과 같이 나타낼 수 있다.
| (1) |
여기서, RRDS(ON) 및 RShunt은 매우 작은값으로 무시하고, VLOAD을 식 (2)와 같이 시간의 함수로 표현할 수 있다.
| (2) |
식 (2)는 미분방정식을 통해 솔레노이드 코일에 흐르는 전류는 식 (3)과 같이 풀이할 수 있다.
| (3) |
여기서, ISAT=VBATT/RLOAD는 포화상태에서의 전류, I0 는 PWM ON시의 초기전류이며, τ=L/RLOAD는 시정수 값을 나타낸다. Fig. 2(b)는 PWM OFF 구간에서 등가회로로써 Free-wheeling용 다이오드가 동작하고, KVL에 의거하여 식 (4)와 같이 나타낼 수 있다.
| (4) |
여기서, 다이오드의 Forward voltage 값이 무시하고 시간의 함수로 근사화하면 식 (5)와 같으며, 1차 미분방정식을 통한 해를 식 (6)과 같이 구할 수 있다.
| (5) |
| (6) |
여기서, I0, τ=L/RLOAD는 각각 PWM OFF시의 초기전류 및 시정수 값을 나타낸다.
2.2 Conventional High/Low side PWM Controlled Solenoid Coil
특별한 어플리케이션에서는 솔레노이드 밸브 구동 시 빠른 응답성을 요구하기도 한다. 차량 전자 현가 시스템에서 댐핑 감쇄력 조절이 그러한 경우이다.
차량의 서스펜션은 노면에서 전달되는 충격을 흡수하여 승차감을 향상시키거나 노면에 요철이 있을 경우에도 타이어의 접지력을 향상시켜 구동력 및 제동력을 확보하는 역할을 한다. 최근 고사양 차량의 경우 운전자의 안전 및 운전 편의를 위하여, 차량의 상태에 따라 핸들 조타 및 바퀴의 상하 진동을 적절하게 조절할 수 있는 연속댐핑제어(CDC) 시스템을 탑재하고 있다. 노면의 환경 및 차량의 주행 상태를 파악하여 차량에 장착된 댐퍼의 감쇠력 특성을 조건에 따라 적응하여 변화시킴으로써 주행 안정성 및 승차감을 향상을 도모한다.5)
차고, 가속도, 조향각 및 차속 정보를 이용하여 차체의 X/Y/Z 각 방향의 움직임을 검출하고, 미리 설계된 제어 로직(Ride, Roll, Drive, Squat)에 기반하여 각 차륜에 장착된 CDC댐퍼 솔레노이드 밸브에 전류를 흐르게 한다. 댐퍼의 인장/압축/행정 시 솔레노이드 밸브에 오일이 통과하게 되며, 이때 제어 전류에 따라서 유로 단면적을 변화하여 오일의 흐름의 양을 조절하여 댐퍼의 감쇠력을 가변할 수 있다. 댐퍼의 감쇠력 변화의 재성능을 발휘하기 위해서는 밸브에 흐르는 전류 지연 최소화, 즉 솔레노이드 밸브는 빠른 전류 응답성을 가져야 한다.
2-1절에서 소개한 SLOW-DECAY 기반 솔레노이드 밸브 구동은 특히 PWM OFF시 환류 전류 소모 속도가 늦다. Fig. 3에서와 같이 0.1 A ~ 1.8 A의 전류 범위를 갖는 R성분이 약 2.5Ω을 갖는 CDC댐퍼 솔레노이드 밸브를 고려할 경우 저전류→고전류 대비 고전류→저전류 제어 시 5배 정도의 시간이 필요하다.

Time constant of R-L circuit
이를 개선하기 위해 Half-bridge 형태로 솔레노이드 밸브 구동이 가능하며, Fig. 4에서와 같이 High-side와 Low-side를 동시에 PWM제어하며 PWM OFF구간시 코일에 발생하는 에너지를 빠르게 환류시켜 소비하도록 한다.

High/Low side PWM controlled solenoid driving circuit
Fig. 5는 High/Low side PWM 병행 제어 솔레노이드 밸브 구동 등가회로를 보여준다.

Equivalent circuits for the High/Low side PWM-ON/OFF states
Fig. 5(a)는 PWM ON 구간에서 등가회로로써 KVL에 의거하여 식 (7)과 같이 나타낼 수 있다.6)
| (7) |
여기서, RFET#1RDS(ON), RFET#2RDS(ON) 및 RShunt는 매우 작은 값으로 무시하고, VLOAD을 시간의 함수로 표현하면 식 (8)과 같다.
| (8) |
식 (8)은 미분방정식을 통해 솔레노이드 코일에 흐르는 전류는 식 (9)와 같이 풀이할 수 있다.
| (9) |
여기서, ISAT=VBATT/RLOAD는 포화상태에서의 전류, I0는 PWM ON시의 초기전류이며, τ=L/RLOAD는 시정수 값을 나타낸다. 식 (3)과 (9)를 살펴보면 PWM ON 구간에서는 동일한 수식을 나타낸다. 즉 2-1절의 Slow-decay 기반 솔레노이드 밸브 구동과 본절의 Fast-decay 기반 솔레노이드 밸브 구동의 전류 축적 속도는 동일함을 할 수 있다.
Fig. 3(b) PWM OFF 구간에서 Free-wheeling용 다이오드가 동작하고, KVL에 의거하여 식 (10)과 같이 나타낼 수 있다.
| (10) |
여기서, 각 다이오드의 순방향 전압값은 매우 작아 무시하고 시간의 함수로 근사화하면 식 (11)과 같다.
| (11) |
식 (11)은 미분방정식을 통해 솔레노이드 코일에 흐르는 전류는 식 (12)와 같이 풀이할 수 있다.
| (12) |
여기서, I0는 PWM OFF시의 초기전류이며, τ=L/RLOAD는 시정수 값을 나타낸다.
식 (6)과 식 (12)를 관찰해보면, Fig. 6과 같이 PWM OFF 구간에서 Slow-decay 기반 솔레노이드 밸브 구동 대비 Fast-decay 기반 솔레노이드 밸브 구동의 전류 소모 속도가 매우 빠르다는 것을 알 수 있다.

R-L circuit time response curves according to fly-back method
2.3 Proposed Heterogeneous High/Low Side PWM Controlled Solenoid Coil
앞 절에서 살펴본 바와 같이 Fast-decay 기반 솔레노이드 밸브 구동은 고전류→저전류 제어 시 빠른 응답성을 얻을 수 있다. 그러나 한 측면의 스위치를 제어하는 것이 아니라 High-side 와 Low-side의 스위치를 동시에 PWM제어 함에 따라 전류 Ripple이 크며, 스위칭 손실이 증가하여 제어기의 발열은 높아지게 된다. 특히 높은 발열은 고온에서의 오동작 및 온도 내구 열화를 야기시킨다. 결국 솔레노이드 밸브 구동 시 응답성과 발열성능, EMI 및 소음 수준에 대한 Trade-off를 고려해야 하며 본 절에서는 이를 적절하게 조절하는 형태의 heterogeneous High/Low side PWM 제어 방안을 제안한다.
Figs. 7~8에서와 같이, High-side FET 및 Low-side FET 제어 시 이종의 주파수 및 DUTY제어를 통해 솔레노이드밸브의 역기전력을 Fast-decay와 Slow-decay 혼합된 방식으로 환류시켜 방출에너지를 소모시킨다. SLOW-DECAY 기반 솔레노이드 밸브 구동 대비 댐퍼의 응답성 개선 및 저전류 제어 한계성을 극복하고, FAST-DECAY 기반 솔레노이드 밸브 구동 대비 발열 개선의 효과를 얻을 수 있다.

Heterogeneous frequency High/Low side PWM controlled solenoid driving

Heterogeneous frequency High/Low side PWM controlled solenoid driving status
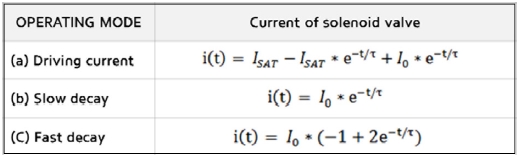
식 (3), (6), (9) 및 (12)를 참조하여, 제안된 기법에 대한 솔레노이드 코일에 흐르는 각 구간별 순시 전류는 Table 1과 같이 표현할 수 있다.

Heterogeneous frequency High/Low side PWM controlled solenoid valve current
3. 제어 기법에 따른 성능과 Trade-off
본 장에서는 일반적인 솔레노이드 제어 방식과 제안된 밸브 제어 방식의 성능을 비교 분석해 본다.
3.1 Analysis of Current Control Response Time
본 절에서는 실제 CDC댐퍼 솔레노이드 밸브의 전기특성에 기반하여 저전류→고전류, 고전류→저전류 제어를 수행함으로써 각 구동 방법에 따른 전류 응답 특성을 비교 분석해 본다. Table 2는 성능을 고찰해보기 위한 파라메타를 나타낸다.
Experiment parameter
2.1 ~ 2.3절을 통해 모델링 된 순시 전류 값을 통해 저전류(0.1 A)→고전류(1.8 A), 고전류(1.8 A)→저전류(0.1 A) 제어를 하여 실제 응답성의 차이를 Fig. 9에서 살펴볼 수 있다. 제안된 HETEROGENEOUS 솔레노이드 밸브 구동 방식은 저전류→고전류 제어 시 전형적인 SLOW-DECAY 및 FAST-DECAY기반의 솔레노이드 밸브 구동 방식과 유사한 수준이며, 고전류→저전류 제어 시는 SLOW-DECAY 대비 빠른 응답성을 나타낸다.

Current response of PWM driven solenoid coil
Fig. 9(a)에서 3가지 제어 방법에 대해 솔레노이드 밸브 구동의 전류 축적 속도는 유사함을 확인할 수 있다. 그러나 전류 소모 속도는 Fig. 9(b)에서와 같이 많은 차이가 남을 확인할 수 있다. 0.1 A RMS 전류에 도달하는 데 Slow-decay 기반 솔레노이드 밸브 구동 시 8 ms 정도 걸리지만, Fast-decay 기반 솔레노이드 밸브 구동 시 약 3 ms 수준이다. 제안된 기법을 적용할 경우 중간 수준인 약 4 ms 정도에 Target 전류에 도달하게 된다.
3.2 Analysis of Power Dissipation
본 절에서는 각 구동 방법에 따른 구동 IC(MOSFET)의 전류 손실을 비교 분석해 본다. MOSFET의 전력 손실은 두 가지 소스에서 발생한다. 모든 MOSFET에는 저항 성분(RDS_ON)이 있어 전류가 장치를 통해 전도되면서 전력을 소비한다. 전력 손실의 다른 원인은 스위칭 손실이다. MOSFET이 켜지고 꺼지면 고유한 기생 커패시턴스가 각 전환 동안 에너지를 저장하고 소모하게 된다.
솔레노이드 밸브 구동을 위한 PWM 제어를 고려할 경우, Fig. 10에서와 같이 전도성 손실, 스위칭 손실로 각 구간을 나타낼 수 있으며, 전체 전력 손실은 식 (13)과 같이 전도성 손실과 스위칭 손실의 합으로 나타낼 수 있다.

PWM controlled solenoid valve driving circuit
| (13) |
Table 3, 4는 각 솔레노이드 구동 방법에 따른 전력 손실을 계산하기 위한 MOSFET의 ON저항과 스위칭 파라미터를 나타낸다.
System parameters for power dissipation calculation
High side and Low side FET parameter
Table 3, 4 및 식 (13)을 참조하여 계산된 Slow-decay 기반 솔레노이드 밸브 구동 시의 전력 손실은 8.068 Watts이다. High side MOSFET의 경우 항상 Turn-ON되어 전도성 손실만을 갖고, Low-side MOSFET의 경우 전도성 손실과 스위칭 손실을 모두 포함하고 있다. 양측 모두 PWM제어를 하는 Fast-decay 기반 솔레노이드 밸브 구동 시의 전력 손실은 15.358 Watts이다. 차량의 각 축에 CDC댐퍼가 적용되고, 총 4개의 밸브를 제어하기 위해 8개의 FET를 사용을 고려하면 위 두가지 제어기법에 따른 전력 손실의 차는 더욱 커지게 된다. 즉 빠른 응답성을 나타내는 Fast-decay의 경우 동작 온도 측면에서 적용 한계성을 만날 수 있다. 제안된 이종주파수 펄스폭변조 제어 기법이 절충안이 될 수 있으며 이를 적용할 경우, PWM 주기마다 Slow-decay와 Fast-decay기반 솔레노이드 밸브 구동 방식이 교차 반복적으로 수행되어 전력 손실은 두 방법의 중간 수준인 11.713 Watts를 나타낸다.
3.3 Analysis of EMI and Acoustic Noise
본 절에서는 각 밸브 구동 방법에 대해 주파수 측면에서 특성을 분석해 본다. 밸브 구동 시의 신호 전력 세기를 주파수 분석함으로써 2 kHz의 기본 주파수 및 체배 주파수의 밀도를 통해 외부로 방사될 때의 소음 수준을 예측할 수 있다. Fig. 11은 구동 방식에 따른 밸브 양단의 전압과 전류 곡선을 나타내며, Fig. 12는 이를 단순 계산한 신호 전력 값을 비교 하였다.

Voltage and current curves through a solenoid valve

Signal power through a solenoid valve in time domain without DC-bias
Fig. 11을 보면, Fast-decay 기반 솔레노이드 밸브 구동의 경우 High-side 측이 가상의 접지에서 바운싱이 되어 양단에 걸리는 전압은 Slow-decay 기반 대비 2배인 2*배터리 전압만큼 ON/OFF 반복 됨을 알 수 있다. 밸브에 흐르는 전류 첨두치 또한 Fast-decay 기반 솔레노이드 밸브 구동이 Slow-decay 기반으로 제어 대비 약 2배이상 높음을 Fig. 12를 통해 확인 할 수 있다. 제안된 기법의 경우 PWM 주기마다 Slow-decay와 Fast-decay기반 솔레노이드 밸브 구동 방식이 교차 반복적으로 나타난다. 전력 밀도의 경우, Fig. 13을 통해 Fast-decay기반 솔레노이드 밸브 구동의 경우 Slow-decay 기반 제어 대비 약 5 dB가량 높음을 알 수 있다.

Signal power through a solenoid valve in frequency domain
4. 결 론
본 논문에서는 솔레노이드 밸브를 PWM제어 하는데 있어 2가지 환류 방식에 따른 순시 전류값을 수학적으로 모델링하고, 응답성과 발열, EMI(전류 Ripple)의 Trade-off를 절절히 고려한 Heterogeneous PWM 제어 방식을 제안하였다.
실제 전자제어현가 시스템에서 사용되는 시스템 및 소자의 파라메타를 기반으로 일반적인 솔레노이드 구동 방식과 제안된 방식의 응답성, 전력소모량, 신호의 특성을 관찰해 보았다.
제안된 기법을 통해 SLOW-DECAY대비 솔레노이드 밸브의 전류 응답성을 어느 정도 개선할 수 있고, FAST-DECAY 대비 FET 발열 감소로 인한 제어기 동작 온도 내구 성능 개선 및 동작 중 전류 Ripple 축소로 인한 EMI 개선 효과를 적절히 취할 수 있음을 확인하였다. 또한 제안된 기법은 FAST-DECAY 회로에서 별도의 ECU 형상 변경 없이 SW 제어 변경을 통해 수행될 수 있어 디버깅을 통한 효율적인 시스템 성능 개선을 위한 좋은 대안이 될 수 있으리라 보여진다.
Nomenclature
| τ : | time constant, s |
| i(t) : | instantaneous current, A |
| Ploss : | total power loss, W |
| RDS(ON) : | drain-source on resistance, Ω |
| dBm : | decibel milliwatt |
Subscripts
| ECS : | electronically controlled suspension |
| CDC : | continuous damping control |
| ECU : | electric control unit |
| EMI : | electromagnetic interference |
| PWM : | pulse wide modulation |
References
-
S. N. Yun, Y. B. Ham and J. H. Park, “A Study on Response Improvement of a Proportional Solenoid Actuator,” Journal of Drive and Control, Vol.13, No.3, pp.47-52, 2016.
[https://doi.org/10.7839/ksfc.2016.13.3.047]

-
N. Ye, S. Scavarda, M. Betemps and A. Jutard, “Models of a Pneumatic PWM Solenoid Valve for Engineering Applications,” Journal of Dynamic Systems Measurement and Control, Vol.114, No.4, pp.680-688, 1992.
[https://doi.org/10.1115/1.2897741]
- H. G. Jung, J. Y. Hwang, P. J. Yoon and J. H. Kim, “Resistance Estimation of a PWM-driven Solenoid,” Int. J. Automotive Technology, Vol.8, No.2, pp.249-258, 2007.
-
N. D. Vaughan and J. B. Gamble, “The Modeling and Simulation of a Proportional Solenoid Valve,” Journal of Dynamic Systems, Measurement and Control, Vol.118, No.1, pp.120-125, 1996.
[https://doi.org/10.1115/1.2801131]
- S. H. Sung, W. J. Jung, Y. J. Kang, B. G. Kim and S. S. Han, “A Study on EMI Mitigation in CDC Solenoid Valve Control Using a Spread Spectrum PWM Technique,” KSAE Fall Conference Proceedings, pp.677-681, 2017.
- R. L. Burden and J. D. Faires, Numerical Analysis, 7th Edn., Brooks Cole, Boston, 2001.