사용자 관점의 자율주행 기능 인터페이스 정보 제공 수준 실험

Copyright Ⓒ 2020 KSAE / 177-06
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
This study investigated the data provided to users through the interface of level 3 autonomous cars under the SAE standard. Among the data on autonomous-car driving to be provided to a user, those that are commonly provided were grouped based on the OEM manual. Data significance was prioritized in the vehicle-to-vehicle and vehicle-to-lane distance maintenance, lane change, low-speed driving, branch road driving, and right turn(intersection) scenarios. The prioritized data were combined into different groups under three methods, and the “quantities of data” on the interface were compared by changing the combinations. Images were provided to the 33 experiment participants through the center fascia inside the car. On average, the perception time was in the 5 s range, the GSR(peak) was in the 2 μs range, the survey was in the 5 s range, and the perception rate was in the 70 % range. Such results can be a useful reference for designing future autonomous-car driving data provision.
Keywords:
Automated vehicle, Information provision, Amount of Information, Visual display, Center fascia, Driving simulator키워드:
자율주행차량, 정보 제공, 정보의 양, 시각 디스플레이, 센터페시아, 드라이빙 시뮬레이터1. 서 론
자율주행 차량을 이용하는 사용자에게 신뢰를 얻기 위해 차량은 주행 정보를 사용자에게 제공해야 한다.1) 전자기기 개발이 가속화되면서 운전자가 차량 운행 중 처리해야 하는 정보의 양이 점점 증가하고 있다.2) 이는 운전자에게 차량의 다양한 정보를 제공하지만, 운전자의 집중력 감소 및 운전 작업 부하를 상승시키는 역효과를 가져왔다.3) 자율주행차량 부품에서 취득되는 수많은 데이터 중, 사용자에게 어떤 정보를 얼마만큼 제공할 것인지에 대한 기준이 필요하다. 예를 들어, 차량 내 클러스터를 통해 전방차량추돌경고 및 차선이탈 경고 같은 자율주행 기능에 대해 시각적 그래픽 형태로 표출하는 것이 운전자의 주의 분산을 방지하고 안전운전에 도움을 준다는 연구가 있다.4) 미국 도로교통안전국 NHTSA에서 공표한 Human Factors Design Guidance for Level2 And Level3 Automated Driving Concepts 문서에서는 운전자 인터페이스에 대한 인적 요소 설계 지침을 제공한다.5) 이 문서에서는 차량과 운전자 간의 인터페이스 요소를 시각, 청각, 촉각으로 구분하여 알림 제공 시 고려해야 하는 요소를 명시하고 있다. 또한, ISO 15008 문서에서는 인체공학적 측면에서 운송 정보 및 제어 시스템의 차량 내 시각적 표시를 위한 사양 및 테스트 절차에 대해 명시하고 있다.6)
OEM의 부분자율주행 차량의 인터페이스 정보제공 방법에 대해 사용자 매뉴얼을 조사하여 차량 구도, GUI 디자인 등 참고하였다.7-10) 이러한 가이드라인 및 매뉴얼을 통해 인터페이스 정보를 제공할 때 사용되는 Symbol, 색상, 크기, 위치에 대해 시각 인터페이스 이미지를 구현하였으며, 전용도로/도심로 자율주행 시스템 주행 상황을 차간&차선거리 유지, 차선변경, 정체로 인한 저속운전, 분기로 진출, 교차로 우회전 상황으로 나누어 실험을 진행하였다.
본 연구는 SAE 기준 레벨3 자율주행차량에서 사용자 입장에서 전용도로, 도심로 주행 환경에 필요한 “정보의 양”에 대해 연구를 진행하였으며, 사용자에게 적정한 양의 시각적 정보를 제공하는 것에 대해 연구하였다.
2. 실험 방법
2.1 실험 변수
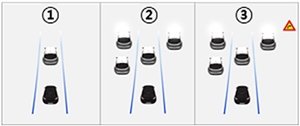
시각적 인터페이스 정보를 조사하여 7가지로 분류하였다. 전방 차량(유무), 차선 검출(유무), 교통 상황, 진행 방향, 측방&후측방 차량(유무), 신호등, 교통 표지판으로 분류하였으며, 이를 Fig. 1처럼 각 주행상황별로 1순위부터 4순위를 정하였다. 운전 경력 5년 이상의 5명(평균 운전 경력: 약 10년)을 대상으로, 각 주행 상황에 따른 인터페이스 정보의 중요도를 설문조사하여 순위화하였다.

By driving situation - ranking information
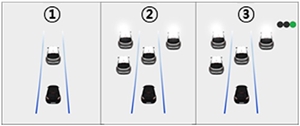
이를 바탕으로 Table 1과 같이 본 실험에서 사용한 독립변수인 정보제공 이미지를 구현하였다. 주행상황마다 “정보의 양”을 1/2순위, 1/2/3순위, 1/2/3/4순위 조합으로 1, 2, 3 수준(Information Quantity Level. IQL)의 이미지를 도출하였으며, 이를 독립변수로 하여 피험자에게 시각적정보제공 이미지로 제공한다. 이때, 각 주행상황별로 정보의 양에 따라 종속변수의 차이가 있는지 분석하기 위해 2 수준 이상의 정보조합이 필요하여, 총 3가지 정보조합의 IQL로 나누었다. 1순위 정보만을 단독으로 제공하는 경우는 주행 상황을 인지하기에 정보의 양이 현저히 적어 부적합하다고 판단되어 제외하였다.

Independent variable - IQL visual informational image
종속변수 중, 정량적 지표는 인지시간, 인지율, GSR(peak)이고, 정성적 지표는 설문조사(인지도 평가)이다. 인지시간과 인지율은 시뮬레이터 실험의 센터페시아 PC를 이용하여 데이터를 취득하였다. 설문조사(인지도 평가)는 실험 시나리오 하나가 종료될 때마다 바로 직전에 경험한 독립변수 이미지에 대해 7점 척도로 인지도를 평가하였다.
이를 통해 각 주행상황에 있어서 몇 수준의 “정보의 양”을 제공해야 하는지 분석하였다.
- 1) 인지시간: 정보제공(+sound) 이후부터 주행 상황을 인지하여 센터페시아 하단의 버튼을 터치한 시간
- 2) 인지율: 어떤 주행 상황이었는지 4가지 버튼 중, 선택하여 오답 확인
- 3) GSR(Peak): 정보제공 이후, 피부전기전도도가 증가하기 시작하는 최저점부터 최고점까지의 변화량
- 4) 설문조사: 전용도로/도심로 주행상황별로 제공된 “정보의 양” 이미지의 인식도
2.2 실험 참여자
IRB 승인(승인번호: KMU-201803-HR-174)받은 동의서에 동의한 피험자를 대상으로 실험을 진행하였다. 2종 보통 이상의 운전면허를 소비한 성인을 대상으로 모집하였으며, 적어도 1년 이상의 운전경력을 가진 운전자로 모집하였다. 본 실험에 참여한 피험자의 전체 수는 33명이고, 이들의 평균 연령은 25세이다. 평균 운전 경력은 약 3년이며 남성 24명, 여성 9명으로 7:3 비율의 피험자를 대상으로 실험을 진행하였다.
2.3 실험 시나리오
SAE 기준 레벨3 자율주행차량의 주행 정보를 사용자에게 센터페시아를 통해 제공하게 된다. 이때 주행상황은 주행속도, 대상 도로, 제어 난이도, 인식 대상에 따라 5개의 자율주행 기능으로 나누었다. 전용도로와 도심로에 해당하는 차간&차선거리 유지 상황, 차선변경 상황, 정체로 인한 저속주행 상황과 전용도로에만 해당하는 분기로 진출 상황, 도심로만 해당하는 교차로 우회전 상황으로 주행상황을 분류하였다. 즉, 각 주행 환경(전용도로/도심로)마다 4가지의 주행 상황이 있다.
ScaNeR Studio 1.8 소프트웨어를 통해 가상환경을 구현하였다. 전용도로 주행 상황은 오산-신갈 IC를 7~8분, 도심로는 5~6분 가량 상암 월드컵 경기장 부근을 주행하게 된다.
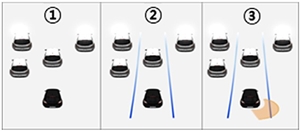
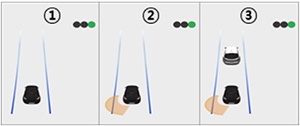
본 실험은 자율주행 시스템이 정상작동 중일 때 취득된 데이터 중, 주행상황에 대한 정보를 피험자에게 제공한다. 즉, 실험 시나리오는 자율주행 시스템이 정상작동 중이고, 피험자는 전방을 보지 않고 NDRT(Non Driving Related Task)로 독서를 한다. 독서에 집중하고 있는 피험자가 시각 정보를 확인할 수 있도록 “상황을 선택해주세요”라는 여성 음성 안내가 동시에 제공된다. Fig. 2와 같이, 센터페시아에 제공된 시각 정보(독립변수)를 확인하여 어떤 주행상황에 대한 정보인지 인지하게 된다. 피험자는 인지한 주행 상황을 4가지 예시 중에서 선택하게 된다.

Example of using center fascia
피험자는 총 12번의 실험 시나리오를 경험하게 된다. 이때, 하나의 시나리오에는 2개의 이벤트 상황이 있기 때문에 총 24개의 독립변수(“정보의 양”) 이미지를 제공받게 된다. 학습효과를 방지하기 위해 모든 시나리오는 지수분포난수를 통해 랜덤으로 조합하였다.
피험자는 하나의 실험이 종료될 때마다 직전에 경험한 “정보의 양” 이미지 2 개에 대해 7점 척도의 인지도 평가 설문조사를 진행하였다.
앞 차량과의 거리를 유지하기 위해 기존에 주행하던 속도보다 낮은 속도로 주행하여 거리를 조절하는 상황이다. 전용도로는 80 ~ 90 km/h, 도심로는 50 km/h를 유지하고, 전용도로가 도심로에 비해 고속으로 주행하기 때문에 차간&차선거리를 유지하기 위해 속도를 조절하는 것에 있어서 변화가 큰 편이다.
차선변경에 관한 정보 제공 이후, 차선을 변경하기 위해 횡방향으로 변화가 생긴다. 속도를 줄여서 근접 차선으로 변경하는 것을 확인할 수 있다. 차선을 변경한 후에는 전용도로/도심로 상황 모두, 설정되어있는 기존의 속도로 주행하기 위해 속도를 높여서 주행한다.
횡방향의 변화 없이 종방향으로만 변화하는 주행인 점이 상황 1과 유사하지만, 속도가 감속되는 폭이 크다. 상황 1은 앞차와의 간격을 유지하기 위해 5 ~ 10 km/h를 감속하는 정도지만 상황 3은 정체로 인한 저속운전 상황이기 때문에 전용도로는 40 ~ 50 km/h를, 도심로는 20 ~ 30 km/h를 감속하는 점에서 차이가 있다.
분기로 진출 상황은 SAE 기준 레벨3 자율주행차량에서 Planned ODD(Operational Design Domain)이기 때문에 15초 전에 정보를 제공할 수 있도록 하였다.11) 분기로 진출할 수 있도록 속도를 서서히 줄이도록 하였다.
차량은 우회전하기 전에 그에 관한 정보를 피험자에게 제공하고, 자율주행차량은 우회전하기 위해 속도를 조절하게 된다. 우회전하는 동안 속도는 약 20 km/h 안팎으로 가감속을 하게 된다. 이는 종횡방향으로 주행을 제어하며 운전하기 때문인 것을 알 수 있다.
2.4 실험 장비
2016년식 LF 쏘나타 캐빈의 Immersive driving simulator를 통해 자율주행차량 실험을 진행하였으며, SCANeR studio 1.8 소프트웨어를 사용하였다. 이 Driving simulator는 Throttle, Brake, Steering에 대한 조작은 물론, 방향 지시등, 비상등 등의 일반 차량과 동일한 시스템을 갖추고 있다. 또한, 센터페시아 pc를 제어할 수 있기 때문에 이를 활용하는 실험에 사용할 수 있다.
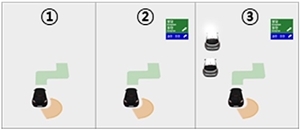
운전 중 스트레스 측정 지표인 GSR(피부전기전도도)을 손에 부착된 EDA 전극을 통해 측정한다.12) Biopac 본체와 무선으로 연결되어 있으며, 손목에 측정기기를 고정하여 실험을 진행한다. Fig. 3과 같이, 센터페시아 PC를 통해 피험자에게 자율주행차량 주행 정보를 제공한다. “정보의 양” 이미지를 통해 어떤 주행상황인지 이해한 후, 하단의 버튼 4개 중 인지한 주행 상황을 터치한다. 이를 통해 피험자가 “정보의 양” 이미지를 주행상황에 맞게 이해하였는지 확인할 수 있다.

Top of center fascia: Image of “Quantity of information” / Bottom of center fascia: Driving status button
3. 실험 결과
주행 환경(전용도로/도심로)에 따른 주행 상황(차간&차선거리 유지, 차선변경, 정체로 인한 저속운전, 분기로 진출. 교차로 우회전)의 정보의 양(IQL)을 인지시간, 인지율, GSR(Peak), 설문조사를 통해 분석한다. 이를 “정보의 양” 이미지에 있어서 정량, 정성 지표별로 데이터 경향을 확인하였다. 각 지표별 평균과 표준편차 값에 대해 Table 2를 통해 확인할 수 있으며, Fig. 4의 Boxplot을 통해 인지시간을, Fig. 5의 Boxplot을 통해 GSR(Peak) 데이터의 경향에 대해 알 수 있다. 또한, 33명 피실험자의 7점 척도 인지도 점수를 매긴 것에 대한 빈도에 관한 그래프를 Fig. 6을 통해 확인할 수 있다.
Dependent variable(perception time, GSR(peak), survey, perception rate) result value by driving situation(maximum value, minimum value)

Boxplot for a drive way and a city way for the perception time data

Boxplot for a drive way and a city way for the GSR(peak) data

Frequency of awareness evaluation(7-point scale) by driving situation
3.1 차간&차선거리 유지
• 인지시간: 전용도로/도심로 주행환경 모두 IQL이 낮을수록 인지시간 평균 수치가 낮았다. 전용도로 전체 평균 5.84 s인 것에 비해 IQL 1의 경우, 5.56 s로 평균보다 낮은 값이 도출되었다. 도심로에서는 전체 평균 5.16 s인 것에 비해 IQL 1에서 4.75 s로 평균보다 낮은 값이 도출되었다. IQL 3에서 가장 높고, IQL 1에서 가장 낮은 값이 도출되었다.
• GSR(Peak): 전용도로/도심로 주행환경 모두 IQL 1에서 가장 낮은 평균 수치가 도출되었다. 전용도로 전체 평균 2.53 μs인 것에 비해 IQL 3의 경우, 6.31 μs로 평균보다 높은 값이 도출되었다. 도심로에서는 전체 평균 5.16 μs인 것에 비해 IQL 1에서 4.75 μs로 평균보다 낮은 값이 도출되었다.
• 설문조사: 전용도로/도심로 주행환경 모두 IQL이 낮을수록 설문조사 평균 점수가 높았다. 도심로 IQL 3의 평균 점수인 4.79 점을 제외하고, 모든 IQL에서 5점대의 인지도 점수가 도출되었다.
• 인지율: 전용도로/도심로 주행환경 모두 IQL이 낮을수록 인지율이 높은 것으로 도출되었다.IQL이 낮을수록 실험 참가자들이 제공된 정보 이미지의 의미를 보다 이해하기 수월한 것을 알 수 있다.
3.2 차선변경
• 인지시간: 전용도로/도심로 주행환경 모두 IQL이 높을수록 인지시간 평균 수치가 낮았다. 전용도로 전체 평균 5.33 s인 것에 비해 IQL 3의 경우, 4.48 s로 평균보다 낮은 값이 도출되었다. 도심로에서는 전체 평균 4.86 s인 것에 비해 IQL 3에서 4.26 s로 평균보다 낮은 값이 도출되었다. IQL 1에서 가장 높고, IQL 3에서 가장 낮은 값이 도출되었다.
• GSR(Peak): 전용도로/도심로 주행환경 모두 IQL 3에서 가장 낮은 평균 수치가 도출되었다. 전용도로 전체 평균 2.45 μs인 것에 비해 IQL 2의 경우, 3.02 μs로 평균보다 높은 값이 도출되었다. 도심로에서는 전체 평균 2.73 μs인 것에 비해 IQL 2에서 3.50 μs로 평균보다 높은 값이 도출되었다.
• 설문조사: 전용도로/도심로 주행환경 모두 IQL이 높을수록 설문조사 평균 점수가 높았다. IQL 1일 경우, 3 점대의 평균 점수가 도출되었으며, IQL 2, 3일 경우에는 5 점대 이상의 평균 점수가 도출되었다.
• 인지율: 전용도로/도심로 주행환경 모두 IQL 1에서 가장 낮은 인지율을 보였다.IQL 1의 경우, 실험 참가자들이 제공된 정보 이미지의 의미를 이해하기 힘들다는 것을 알 수 있다.
3.3 정체로 인한 저속운전
• 인지시간: 전용도로/도심로 주행환경 모두 IQL 2에서 인지시간 평균 수치가 가장 낮았다. 전용도로 전체 평균 5.07 s인 것에 비해 IQL 2의 경우, 4.88 s로 평균보다 낮은 값이 도출되었다. 도심로에서는 전체 평균 4.34 s인 것에 비해 IQL 2에서 3.99 s로 평균보다 낮은 값이 도출되었다. IQL 3에서 가장 높고, IQL 2에서 가장 낮은 값이 도출되었다.
• GSR(Peak): 전용도로/도심로 주행환경 모두 IQL 1에서 가장 낮은 평균 수치가 도출되었다. 전용도로 전체 평균 2.48 μs인 것에 비해 IQL 2의 경우, 3.09 μs로 평균보다 높은 값이 도출되었다. 도심로에서는 전체 평균 2.32 μs인 것에 비해 IQL 3에서 2.72 μs로 평균보다 높은 값이 도출되었다.
• 설문조사: 전용도로는 IQL 2, 도심로는 IQL 1에서 설문조사 평균 점수가 가장 높았다. 전용도로는 IQL 1, 2, 3의 평균값이 모두 5 점대였으며, 도심로는 5.82 점대의 평균 점수가 도출되었다. 도심로 IQL 1일 때, 6.21 점의 평균값으로 가장 높은 점수가 도출되었다.
• 인지율: 전용도로/도심로 주행환경 모두 IQL 1에서 가장 높은 인지율을 보였다.
• IQL 3의 경우, 실험 참가자들이 제공된 정보 이미지의 의미를 이해하기 힘들다는 것을 알 수 있다.
3.4 분기로 진출
본 주행상황은 전용도로에만 해당하는 상황이다.
• 인지시간: IQL 2에서 인지시간 평균 수치가 가장 낮았다. 전체 평균 5.06 s인 것에 비해 IQL 2의 경우, 4.26 s로 평균보다 낮은 값이 도출되었다.
• GSR(Peak): IQL 2에서 가장 낮은 평균 수치가 도출되었다. 전체 평균 4.63 μs인 것에 비해 IQL 3의 경우, 5.16 μs로 평균보다 높은 값이 도출되었다.
• 설문조사: IQL 2에서 설문조사 평균 점수 6.15 점으로 가장 높았다. 전체 평균이 5.59 점인 것에 비해 IQL 1에서 평균 4.82 점수가 도출되었다.
• 인지율: IQL 2에서 97 %의 가장 높은 인지율을 보였다.IQL 2의 경우, 실험 참가자들이 제공된 정보 이미지의 의미를 이해하기 수월하다는 것을 알 수 있다.
3.5 교차로 우회전
본 주행상황은 도심로에만 해당하는 상황이다.
• 인지시간: IQL 3에서 인지시간 평균 수치가 가장 낮았다. 전체 평균 5.97 s인 것에 비해 IQL 3의 경우, 5.51 s로 평균보다 낮은 값이 도출되었다.
• GSR(Peak): IQL 1에서 가장 낮은 평균 수치가 도출되었다. 전체 평균 2.63 μs인 것에 비해 IQL 1의 경우, 2.28 μs로 평균보다 낮은 값이 도출되었다.
• 설문조사: IQL 1에서 설문조사 평균 점수 4.27 점으로 가장 높았다.
•인지율: IQL 1에서 82 %의 가장 높은 인지율을 보였다.IQL 1의 경우, 실험 참가자들이 제공된 정보 이미지의 의미를 이해하기 수월하다는 것을 알 수 있다.
4. 결론 및 토의
차간&차선거리 유지, 차선변경, 정체로 인한 저속운전, 분기로 진출, 교차로 우회전하는 주행 상황에 있어서 인지시간, GSR(Peak), 설문조사, 인지율 지표에 대해 분석하였다. 실험 참가자는 센터페시아에 제공된 이미지를 통해 정보를 제공받기 때문에, 이미지의 퀄리티에 따라 결과가 바뀔 수 있을 것이다. 결과를 기반으로 추후에 사용자 Needs 요소를 추가한 정보에 관한 연구와 다양한 주행상황을 기반으로 한 정보제공에 관한 연구가 진행될 수 있다.
- 1) 각 주행상황의 IQL 1, 2, 3 인지시간 합의 평균은 5 s대이며, 도심로의 정체로 인한 저속운전 상황에서만 평균 4 s대이다.
- 2) 각 주행상황의 IQL 1, 2, 3 GSR(Peak) 합의 평균은 2 μs이며, 전용도로의 분기로 진입 상황에서만 평균 4 μs이다.
- 3) 각 주행상황의 IQL 1, 2, 3 설문조사 합의 평균은 5 점대이며, 도심로의 교차로 우회전 상황에서만 3 점대이다.
- 4) 전용도로/도심로 모두 해당하는 주행상황(차간&차선거리 유지, 차선변경, 정체로 인한 저속운전) 중, 차간&차선거리 유지상황의 인지율은 평균 50 %대이고, 차선변경은 평균 80 %대이다. 정체로 인한 저속운전 상황은 전용도로에서 평균 77 %, 도심로에서 평균 92 %으로 평균 점수에 차이가 있다.
- 5) 분기로 진출 상황의 인지율은 평균 91 %이며, 교차로 우회전은 평균 66 %이다.
본 논문은 기술통계 분석을 기반으로 작성하였다. 추후에 추론통계 분석을 진행하여 각 주행상황별로 몇 수준의 “정보의 양”이 적절한 정보인지 확인할 수 있으며, 보다 정확한 기준을 제공할 수 있을 것이다. 이는, 같은 주행상황일지라도, 전용도로/도심로 환경에 따라 제공되어야 할 수준에 차이를 둬야함을 제시할 수 있을 것이며, 같은 주행환경이더라도, 주행상황에 따라 운전자에게 제공해야 할 수준에 차이가 있음을 제시할 수 있을 것이다.
Acknowledgments
본 연구는 산업통상자원부 산업기술혁신사업의 지원(10079730, 자동차 전용도로/도심로 자율주행 시스템 개발 및 성능평가)과 과학기술정보통신부의 재원으로 한국연구재단의 기초연구사업의 지원을 받아 수행되었습니다(No.2017R1A2B4008615). 실험에 도움을 준 홍사라, 하정우에게 감사드립니다.
References
-
H. J. Yeon and J. S. Kim. “An Identification of the Design Factors for ‘Trust’ Affordable Automated Vehicle’s User Interface: Towards a Comparison of Millennium and New Silver Generation,” Journal of Cultural Product & Design, Vol.56, pp.25-37, 2019.
[https://doi.org/10.18555/kicpd.2019.56.03]

-
P. M. Knoll, “The Use of Displays in Automotive Applications,” Journal of the Society for Information Display, Vol.5, No.3, pp.165-172, 1997.
[https://doi.org/10.1889/1.1985149]
- T. Y. Koo, B. Y. Kim, S. H. Ji, C. H. Bae, J. H. Park and M. W. Suh, “A Study on Workload of Using Telematics while Driving,” Transactions of KSAE, Vol.17, No.2, pp.26-33, 2009.
-
M. J. Kim, S. K. Lee and S. H. Park, “A Development of EURO 6 Smart Cluster System Using OBD-II Standard Interfaces and Smart Cluster Interface,” Transactions of KSAE, Vol.26, No.1, pp.85-96, 2018.
[https://doi.org/10.7467/KSAE.2018.26.1.085]
- J. L. Campbell, J. L. Brown, J. S. Graving, C. M. Richard, M. G. Lichty, L. P. Bacon, J. F. Morgan, H. Li, D. N. Williams and T. Sanquist, Human Factors Design Guidance for Level2 and Level3 Automated Driving Concepts, Report No. DOT HS, 812 555, 2018.
- ISO 15008:2017, Road Vehicles - Ergonomic Aspects of Transport Information and Control Systems - Specifications and Test Procedures for In-vehicle Visual Presentation, https://www.iso.org/standard/62784.html, , 2019.
- Volvo XC90 Owner’s Manual, https://www.volvocars.com, , 2019.
- Audi, Owner’s Manual, https://ownersmanuals2.com, , 2019.
- Tesla, MODEL S Owner’s Manual, https://www.tesla.com, , 2019.
- Cadilac, CT6 Owner’s Manual, https://www.gme-infotech.com, 2019.
- Submitted by Japan, Proposal: Driver Availability Recognition System and Transition Demand, ACSF, https://wiki.unece.org/display/trans/ACSF+18th+session, , 2018.
-
R. Sahoo and S. Sethi, “Functional Analysis of Mental Stress Based on Physiological Data of GSR Sensor,” Emerging ICT for Bridging the Future-Proceedings of the 49th Annual Convention of the Computer Society of India (CSI), Vol.1, pp.109-118, 2015.
[https://doi.org/10.1007/978-3-319-13728-5_12]