선회 주행 조건을 반영한 타이어 구름저항 평가 방법

*This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium provided the original work is properly cited.
Abstract
This paper presents a new test method to calculate the tire rolling resistance when considering the vehicle’s cornering condition. The difference of force and torque methods in ISO 28580 is explained theoretically and experimentally. Vehicle test was performed in two locations, namely, Korea International Circuit(KIC) and real road. A mathematical model to represent the relationship between lateral acceleration, and slip and camber angles was derived from the test results at KIC. Lateral acceleration was measured from the real road test, while the slip and camber angle variation was estimated by using the derived mathematical model. The new rolling resistance coefficient of the tire when considering the cornering condition is calculated and compared with the one measured according to ISO 28580.
Keywords:
Rolling resistance, Cornering condition, Korea International Circuit, Real road, Slip angle, Camber anglel키워드:
구름 저항, 선회 조건, 한국 국제 자동차 경주장, 실 도로, 슬립각, 캠버각1. 서 론
CO2를 저감하기 위해 적은 연료로 충분한 파워를 얻어야 하는 내연기관 자동차와 주행 거리 향상을 위해 적은 배터리 용량으로 충분한 파워를 얻어야 하는 전기자동차에 있어서 타이어 구름저항(Rolling resistance)은 자동차 연비와 직접적인 상관성이 있는 중요 부품이다.1,2) 특히, 자동차의 보유와 운행이 늘어나면서 A/S시장용 타이어에 대한 연비 성능을 등급화 하는 Labeling 제도를 유럽, 일본 및 국내에서 의무화시킴에 따라 타이어 연비는 그 중요성이 점차 강화되고 있다.3)
타이어와 차량 연비의 상관성에 대한 연구가 많이 진행되었다. 타이어 구름저항은 공기저항(Air resistance), 내부마찰(Internal friction) 및 관성저항(Inertial resistance)과 함께 차량의 연비에 영향을 끼치는데, 오염락4)은 상기 저항 중 타이어 구름저항이 차량 연비에 미치는 영향이 시내도로에서는 30 %, 시외곽 도로에서는 27 %, 자동차 전용도로에서는 18 %의 비율을 차지하고 있다고 제시하였다. 미국도로교통안전국(NHTSA)은 승용차용 타이어에 대하여 타이어 구름저항이 10 % 증가하면 차량 연비는 1.1 % 감소한다는 것을 시험적으로 증명하였다.5) 김정민6,7)은 EV/HEV 성능 해석 시뮬레이터를 개발하여 타이어 구름저항이 21.2 % 증가하면 EV의 연비는 9.3 % 감소하고, HEV의 연비는 4.9 % 감소함을 확인하였다.
상기의 연구들은 ISO 28580 시험법8)에 따라 타이어 연비를 측정하여 차량 연비와의 상관성을 분석하였으나, ISO 28580은 타이어의 슬립각(Slip angle)과 캠버각(Camber angle)이 0°인 상태에서 타이어의 구름저항을 측정하는 방법으로, 차량의 선회 조건을 고려할 수 없다는 한계가 있다. 선회 시 슬립각과 캠버각 변화에 따라 타이어의 횡방향 변형이 나타나게 되고, 타이어 구름저항 발생의 주요 요인이 변형에 의한 내부 손실 에너지인 만큼, 슬립각과 캠버각을 고려한 타이어 연비 측정이 필요하다.
본 연구에서는 차량 선회 조건을 고려한 타이어 복합연비 평가방법을 제안하고자 한다.
2. 타이어 구름 저항 계수
2.1 ISO 28580에 따른 타이어 구름저항 계수
대부분의 국가에서 타이어 구름저항을 ISO 28580에서 규정한 힘법(Force method)와 토크법(Torque method)의 두 가지 방법으로 주로 측정한다. 시험 장비 및 공기저항에 의한 수반손실(Parasitic loss)을 무시할 때 타이어 구름저항은 다음과 같이 계산된다.8)
힘법에 의한 타이어 구름 저항은 식 (1)과 같이 계산한다. 식 (1)에서 FR은 타이어 구름저항, Ft는 타이어 스핀들에서 계측한 종방향 반력, rL은 타이어 구름 반경, R은 드럼 반경이고, 각각의 정의는 Fig. 1에 도시되어 있다.
| (1) |

Measurement parameters to get tire rolling resistance
토크법에 의한 타이어 연비는 식 (2)와 같이 계산한다. 식 (2)에서 Tt는 드럼 스핀들에서 계측한 반력토크이다.
| (2) |
where Tt : reaction torque at drum spindle
식 (1)과 식 (2)의 결과로부터 타이어 구름저항계수(RRc, Rolling resistance coefficient)는 식 (3)과 같이 계산한다. 식 (3)에서 Zt는 타이어에 가하는 수직하중이다.
| (3) |
where RRc : tire rolling resistance coefficient (N/kN), Zt : tire normal load (N)
실험에 영향을 끼치는 모든 잡음 요소를 제거한 상태에서 동일한 타이어를 동일한 시험조건에서 힘법과 토크법을 통해 측정한 타이어 구름저항 계수는 같아야 한다. Table 1은 자동차부품연구원에서 보유하고 있는 회전 저항 시험기를 이용하여 ISO 28580에 따라 측정한 타이어의 구름저항계수 결과를 보여준다. 승용차용 타이어(PC Tire)와 트럭버스용 타이어(TB Tire)모두 힘법과 토크법을 이용하여 측정한 구름저항계수의 평균값의 차이가 0.06 N/kN 이내로 매우 유사하게 측정되고 있음을 확인할 수 있다.

Rolling resistance coefficients of PC & TB Tires measured by force and torque methods
2.2 슬립각 및 캠버각이 타이어 구름저항 계수 변화에 미치는 영향
타이어 구름저항은 자동차가 앞으로 나아가는 것을 방해하는 타이어에 의해 발생하는 저항력이다. 슬립각은 차량 진행방향과 바퀴 진행방향 사이의 각도로 정의되는데,9) 차량 선회 시 타이어에 발생하는 슬립각과 캠버각은 타이어와 노면사이에 발생하는 힘에 영향을 준다. Fig. 2는 직진 주행하는 타이어와 선회하는 타이어에 발생하는 힘의 관계를 보여준다.

Reaction forces between tire and road under different driving conditions
Fig. 2(a)는 직진 주행할 때의 상황으로 종방향 힘(Fx, Longitudinal force)만 존재하고, 횡방향 힘(Fy, Lateral force)은 발생하지 않는다. 이 상황에서는 슬립각이 없기 때문에 차량 진행방향과 타이어 진행방향이 같고, 타이어 구름저항은 Fx에 의해서만 결정된다. 한편, Fig. 2(b)는 선회 시 상황으로 종방향힘과 횡방향 힘이 모두 발생하고 있다. 차량 선회시 슬립각에 의해 타이어에 횡력(Fy)이 발생하게 되고, 이로 인해 차량 진행 방향으로 차량의 주행을 방해하는 성분 Fyx가 발생하게 된다. 또한, 타이어 종방향 힘(Fx)에 의한 차량 진행 방향으로 차량의 주행을 방해하는 성분은 Fxx이다. 따라서 선회시 이 두 성분의 합력(Fx', 식 (4) 참조)이 차량 주행을 방해하는 성분이고, 이것이 선회시의 타이어 구름저항으로 나타나게 된다.
| (4) |
Fig. 3은 자동차부품연구원에서 보유한 FlatTrac 시험기로 AUDI S8차량용 타이어에 대해 60 km/h, 5.3 kN의 수직하중 조건에서 휠 센터에서 측정한 슬립각과 캠버각 변화에 대한 타이어 종방향 힘과 횡방향 힘의 변화를 보여준다. 슬립각과 캠버각이 변할 때 종방향 힘은 일정한 값을 유지하고, 횡방향 힘만 크게 변화하고 있음을 알 수 있다. 따라서 선회주행상황(Fig. 2(b) 참조)에서 타이어 종방향힘은 직진주행상황(Fig. 2(a) 참조)과 동일한데 반해, 횡력은 크게 나타나기 때문에 선회시 타이어의 구름저항을 결정하는 성분인 Fx'가 Fx보다 크게 되고, 이로 인해 선회시 타이어 구름저항은 증가하게 된다.

Variation of reaction forces measured at wheel center according to changes of slip and camber angles
2.1절에 기술한 타이어 구름저항을 측정하는 힘법과 토크법의 경우, 힘법은 휠 센터에 부착된 로드 셀(Load cell)에서 종방향 힘을 계측하고, 토크법은 드럼 스핀들에 부착된 토크셀(Torque cell)에서 타이어 주행에 필요한 토크를 계측한다. 따라서 Fig. 2(b)의 선회 주행상태에서 힘법은 Fx를 기준으로 구름저항계수를 산출하고, 토크법은 타이어의 드럼에 대한 추진력 Fx'에 의한 반력 토크를 기준으로 구름저항계수를 산출하기 때문에 타이어 선회 조건에서는 토크법을 사용하는 것이 선회시 타이어의 구름저항 증가를 측정할 수 있다.
Fig. 4는 AUDI S8차량용 타이어에 대하여 슬립각과 캠버각을 변화시키면서 힘법과 토크법으로 측정한 구름저항 계수 변화를 보여준다. Fig. 4(a)에서 슬립각이 -2° ~ +2°로 변할 때 구름저항계수의 변화량은 캠버각 5°에서 최대 2.69 N/kN이고, 캠버각이 -2° ~ +5°로 변할 때 구름저항계수의 변화량은 슬립각 2°에서 최대 3.96 N/kN인 것으로 나타났다. 그러나 Fig. 4(b)에서는 구름저항계수의 변화가 보다 확연하게 드러나는데, 슬립각이 -2° ~ +2°로 변할 때 구름저항계수의 변화량은 캠버각 -1°에서 최대 17.47 N/kN이고, 캠버각이 -2° ~ +5°로 변할 때 구름저항계수의 변화량은 슬립각 2°에서 최대 2.11 N/kN인 것으로 나타났다. Fig. 4의 실험결과에서 보여지듯이 차량 선회조건에서는 슬립각에 의한 회전 저항 변화를 토크법이 보다 정확하게 산출할 수 있다.

Comparison of RRc variation according to measurement method
Fig. 4(b)에서 ISO 28580에 따른 캠버각 0°, 슬립각 0°인 상태에서 측정한 구름저항계수는 9.55 N/kN이었으나 슬립각이 -2°로 변화할 때 구름저항계수는 26.36 N/kN까지 176 % 증가한다. 앞서 서론에서 살펴본 구름저항계수가 10 %증가하면 연비가 1.1 %가 낮아진다는 연구결과로부터, 슬립각이 -2°발생하면 연비가 약 19.4 % 낮아질 가능성이 있기 때문에, 차량의 슬립각 변화를 고려한 타이어 복합연비평가법 개발이 필요하다.
3. 실차 데이터 계측
3.1 계측 준비
도로 주행 조건에서 타이어 슬립각 변화를 계측하기 위하여 Fig. 5와 같이 AUDI S8차량 우측 휠에 휠 위치 센서(WPS, Wheel Position Sensor)를 부착하였다. 차량 내부에 GPS/IMU을 장착하여 위치, 속도, 가속도 정보를 취득하였고, e-DAQ를 이용하여 실시간으로 모든 신호를 수집하였다. Fig. 5의 휘 위치 센서를 장착한 상태에서 도로를 주행하기 위해서는 담당 기관으로부터 허가를 받아야 하고, 주행 중 사고의 위험이 따르기 때문에 실제 도로에서 타이어 캠버각과 슬립각을 계측하기엔 한계가 있다. 이에 본 연구에서는 두 단계에 걸쳐서 실차 시험을 진행하였다. 먼저, WPS, GPS/IMU를 장착한 상태에서 코리아인터내셔널서킷(KIC, Korea International Circuit)에서 차량의 횡가속도와 캠버각 및 슬립각 데이터를 측정하여 데이터 간 상관성을 대변할 수 있는 모델식을 생성하였다. 다음, GPS/IMU 센서만을 장착한 상태에서 전남 목포-광주구간 도로를 주행하여 계측한 횡가속도를 모델식에 입력하여 실 도로 주행 시의 슬립각과 캠버각 변화를 도출 하였다. 선회속도가 타이어 횡력변화에 끼치는 영향을 확인하기 위하여 Fig. 6과 같이 자동차부품연구원에서 보유하고 있는 드럼형 타이어 성능/내구시험기를 이용하여 AUDI S8에 장착한 타이어에 대한 속도 및 슬립각 변화에 따른 횡력 변화를 계측하였다. 슬립각이 -10° ~ +10°로 변화할 때 속도 변화에 대한 타이어 횡력 변화(0.53 kN)는 슬립각 변화에 대한 횡력(5.67 kN)의 9 % 수준인 것으로 나타나고 있다. 따라서 본 연구에서는 차량의 속도가 횡력에 미치는 영향은 없는 것으로 간주하였다.

Wheel position sensor

Variation of lateral force of tire according to changes of speed and slip angle
3.2 실차 시험
Fig. 7은 60 km/h의 일정속도로 KIC 1 바퀴 주행 시 AUDI S8차량의 횡가속도와 전륜 우측 타이어의 캠버각 및 슬립각 변화를 보여준다. 파란 점은 계측 값이고, 붉은 실선은 계측값을 0.5 Hz low pass filter를 거쳐 얻은 값이다. Fig. 7(a)에서 차량이 KIC를 1바퀴 주행하는 동안 총 8회의 급선회를 했으며 횡가속도의 최대값은 0.72 g, 최소값은 -0.61 g였고, 직진 주행구간에서 횡가속도는 ±0.05 g 미만인 것으로 확인되었다. Fig. 7(b) 캠버각 변화와 Fig. 7(c) 슬립각 변화 추이가 Fig. 7(a)의 횡가속도 변화 추이를 잘 추종하고 있음을 확인할 수 있다. 이것은 차량에 발생하는 횡가속도와 타이어 캠버각 및 슬립각간의 상관성을 수학 모델로 나타낼 수 있다는 근거가 된다.

Original and filtered vehicle test data measured at KIC
Fig. 8은 Fig. 7에서 필터링 한 값을 횡가속도 변화와 타이어 캠버각 및 슬립각간의 변화 선도로 변환한 그래프이다. Fig. 8(a),(b)에서 횡가속도(ay)에 대한 캠버각(θx)과 슬립각(θz) 변화의 회귀모델(Regression model)을 각각 식 (5)와 식 (6)과 같이 다항식 함수로 도출하였다.

Regression models to estimate changes of camber and slip angles according to lateral acceleration
| (5) |
| (6) |
where ay : lateral acceleration, θx : camber angle, θz : slip angle
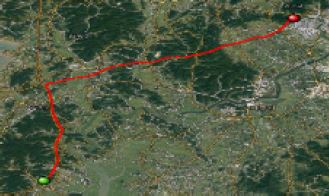
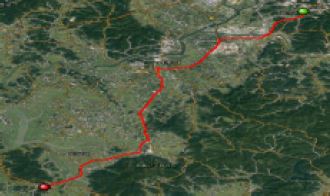
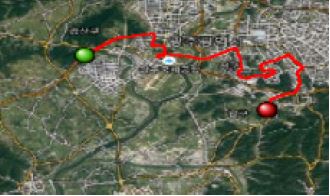
AUDI S8차량으로 목포-광주 구간 약 137 km를 주행하였고, 주행 도로에 대한 정보가 Table 2에 나타나있다. 계측한 횡가속도 데이터는 20 Hz Low pass filter를 통해 고주파 성분을 제거하였다.
Driving route
Fig. 9는 도로 조건별로 계측한 횡가속도 데이터를 보여준다. 선회구간이 가장 큰 City road와 Public road에서 횡가속도가 가장 크고, 직진 주행이 위주인 Highway에서 횡가속도가 가장 작게 발생하고 있음을 확인할 수 있다. Fig. 7(a)에서 횡가속도가 ±0.05 g 미만일 경우 직진주행 상황인 것으로 나타났으므로, 도로 주행 시 횡가속도가 ±0.05 이상일 때 차량이 선회하고 있다고 판단하였다. Fig. 9의 횡가속도 데이터 전체를 식 (5)와 식 (6)에 각각 입력하여 추정한 도로 주행 시 캠버각과 슬립각 변화가 Fig. 10과 같다. 캠버각은 -0.45°~ 0.55°까지 변화하며 슬립각은 -4.01° ~ 6.05°까지 변화하고 있다. Fig. 4(b)의 결과에서 슬립각이 -2° ~ 2°변화할 때 캠버각 변화 -1° ~ 1°가 구름저항 변화에 미치는 영향은 최대 1.28 kN/N으로 캠버각 -1°인 상태에서 슬립각이 -2° ~ 2°로 변화할 때의 구름저항계수 변화 17.47 N/kN의 7.3 %에 불과하다. 따라서 본 연구에서는 선회 시 캠버각 변화에 의한 구름저항변화는 없다고 간주하였다.

Measured lateral force data at city, highway and public roads

Camber and slip angle variation at real road driving condition
4. 타이어 복합연비 평가법 개발
Fig. 10의 실차에서의 슬립각 변화(-4.01° ~ 6.05°)가 Fig. 4(b)의 장비에서의 슬립각 변화 범위(-2° ~ 2°)를 넘어서므로, Fig. 11과 같이 캠버각 0°에서 측정한 슬립각(θz) 변화에 대한 구름저항계수(RRc) 변화를 추정하는 선도를 생성하였고, 형태는 식 (7)과 같다.

Rolling resistance coefficients of measured data at machine and regression model
| (7) |
Fig. 9의 횡가속도 데이터 전체를 크기별로 구분하였고, 각 구간별 데이터 개수가 Table 3과 같다. Table 3에서 횡가속도 크기가 -0.05 g ~ 0.05 g 구간인 6번째 구간은 직진주행상태이다. 직진주행은 전체 데이터개수의 77.58 %를 차지하고, 나머지 22.42 %가 선회 상태임을 알 수 있다.
Count and percentage of lateral acceleration
Table 3에서 횡가속도의 대푯값(Ay)을 구간 범위의 중간값(Median value)으로 설정했을 때, 횡가속도에 따른 슬립각(θz), 구름저항계수(RRc)를 각각 식 (6)과 식 (7)을 이용하여 추정하였고, 결과가 Table 4와 같다. Table 4에서 횡가속도 데이터 개수를 직진주행상태의 횡가속도 데이터 개수 691,712에 대해 정규화 시킨 값이 Norm.P이고, 이는 전체 주행데이터 중 직진 구간 대비 선회 구간의 출현 횟수를 의미한다. 상기 결과로부터 선회 조건을 고려한 타이어 복합 구름저항계수(RRcComplex)는 식 (8)과 같이 계산할 수 있다.
| (8) |
Table 4에서 복합 구름저항계수는 14.64 N/kN로 계산되었으며, ISO 28580에 따른 구름저항계수 9.55 N/kN(Fig. 4(b) 참조) 보다 5.09 N/kN(53.3 %↑) 큰 값이다.
Complex tire rolling resistance coefficient
서론에서 언급한 선행연구5-7)에 따르면 타이어 구름저항이 10 % 증가하면 내연기관차의 연비는 1.1 % 감소, EV의 연비는 4.4 % 감소, HEV의 연비는 2.3 % 감소한다. 이를 본 연구에서 제시한 타이어 복합구름저항을 기준으로 환산하면 복합구름 저항이 ISO 28580에 따른 구름저항보다 53.3 % 증가하였으므로, 내연기관차는 5.8 %, EV는 23.4 %, HEV는 12.3 % 연비가 감소할 것으로 예상된다.
또한 국내 타이어 효율등급 기준10)에 비추어 보면 Fig. 12와 같이 복합 구름저항계수는 5등급으로 ISO 28580에 따른 구름저항계수 4등급보다 1등급 떨어지는 결과를 초래한다. 본 연구에서 제시한 타이어 복합 구름저항계수를 적용하면 직진과 선회주행을 포함한 자동차 연비를 계산할 수 있고, 이를 바탕으로 공인연비와 실연비간의 차이를 줄이는데 도움을 줄 것으로 예상된다.

Comparison of rolling resistance coefficients between ISO 28580 and new method
5. 결 론
본 연구에서는 차량 선회조건을 고려한 타이어 복합연비 평가법을 제시하였고, 결과가 아래와 같다.
- 1) ISO 28580에서 규정한 힘법과 토크법에 따른 구름저항 측정의 차이를 이론적으로 분석하였고, 슬립각이 적용되었을 경우에는 토크법이 유효함을 실험데이터로 입증하였다.
- 2) 차량을 활용한 서킷 주행 데이터를 바탕으로 횡가속도와 슬립각 및 캠버각의 상관관계를 대변하는 수학모델을 제시하였다.
- 3) 도로 주행에서 계측한 횡가속도를 2)에서 유도한 수학모델에 입력하여 도로 주행상황에서의 슬립각 및 캠버각 변화를 추정하였다.
- 4) 도로주행 데이터 분석 결과 직진 주행은 77.58 %, 선회 주행은 22.42 %를 차지하고 있었고, 구간별 횡가속도 개수 데이터를 정규화시켜 타이어 복합구름저항계수를 산출하였다.
- 5) 복합구름저항계수(14.64 N/kN)는 ISO 28580에 따른 구름저항계수(9.55 N/kN)보다 53.3 % 크게 산출되었고, 이는 내연기관차는 5.8 %, EV는 23.4 %, HEV는 12.3 % 연비가 감소되는 효과를 불러올 것으로 예상된다.
본 연구 성과를 바탕으로 향후 공기압 변화까지 고려한 타이어 복합 연비 시험법에 대해 연구할 계획이다.
Acknowledgments
이 연구는 2016년도 산업통상자원부 및 한국산업기술진흥원(KIAT) 연구비 지원에 의한 연구임(R0002607, 고성능 자동차 핵심기술 연구개발 센터구축).
References
-
D. J. Schuring, “Effect of Tire Rolling Loss on Vehicle Fuel Consumption”, Tire Science and Technology, 22(3), p148-161, (1994).
[https://doi.org/10.2346/1.2139539]

- S. J. Hong, and H. G. Lee, “An Experimental Study of Tire Safety & Economical Efficiency with Respect to Inflation Pressure”, Transactions of KSAE, 18(1), p8-13, (2010).
- S. J. Lee, and C. Y. Sohn, “Navigating of EU Environmental Regulation for Tire”, Auto Journal, KSAE, 31(3), p16-27, (2009).
- Y. R. Oh, “Effects of Tire Inflation Pressures on Tire Characteristics or Vehicle Performance”, Auto Journal, KSAE, 40(3), p25-31, (2018).
- K. W. Suh, and K. Y. Jung, “The Statistical Evaluation for the Wear Life of Brake Pad Linings in Vehicle Durability Test and Customer Usage Environment”, Transactions of KSAE, 7(5), p213-220, (1999).
- L. R. Evans, J. D. MacIsaac Jr., J. T. Harris, K. Yates, W. Dudek, J. Holmes, J. Popio, D. Rice, and M. K. Salaani, NHTSA Tire Fuel Efficiency Consumer Information Program Development : Phase 2 - Effects of Tire Rolling Resistance Levels on Traction, Treadwear, and Vehicle Fuel Economy, U.S. Department of Transportation, (2009).
- J. Kim, S. Kwon, S. Chung, B. Lee, J. Kim, and K. Lee, “A Study on the Driving Characteristics of Electric Vehicle Energy Consumptions by Tire Rolling Resistance Coefficients”, KSAE Spring Conference Proceedings, p1635-1639, (2012).
- J. Kim, S. Kwon, S. Chung, B. Lee, J. Kim, and K. Lee, “Analysis of Fuel Economy for a Hybrid Electric Vehicle by Tire Rolling Resistance Coefficients”, KSAE Annul Conference Proceedings, p1635-1639, (2012).
- ISO 28580 : 2009(E), International Standard Organization, 2009.
- T. D. Gillespie, Fundamental of Vehicle Dynamics, Pearson education Korea, Seoul, (2002).
- Regulation for Measurement of Automotive Tire's Energy Efficiency and Grades and Marking, 2013.